
Mudd I
On 10 NOV 2006, Mudd I was launched. The principal goal of the flight was to measure the magnitude of the signals from the piezoelectric vibration sensors, so that the conditioning circuitry could be designed to maximize the SNR and resolution for the data-acquisition system. Secondary goals were to test the R-DAS for suitability as a back-up data acqusition system, test telemetry from the R-DAS, test the video feed from the BoosterVision camera, test the GPS on the R-DAS, work out the logistics of preparation, launch, data-acquisition, and data analysis, and get a Level I certification for the principal student rocketeer.
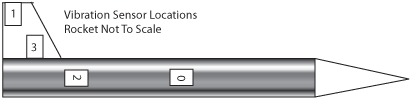
Mudd I was a modified PML D-Region Tomahawk. The avionics included an R-DAS compact, the GPS module, the 900 MHz Telemetry module, a custom hand-wired board for conditioning the vibration sensors, a Blacksky AltAcc2 for redundancy, and a BoosterVision 2.4 GHz wireless video camera. Both the R-DAS and the AltAcc2 were set to fire the ejection charge at apogee with separate electronic matches. The video camera was directed straight out the side of the camera, rather than down toward the tail as is the usual case. In addition to the accelerometers and altimeter/pressure sensors on the R-DAS and AltAcc2, there were four MSI FDT-series piezoelectric vibration sensors attached to the body and fins.
The detailed flight results are presented in the links in the sidebar starting with The Data Overview. The summary results were: The rocket launched successfully. The peak acceleration was about 6 g's. The ejection charge fired at apogee, just under 1000 ft. The AltAcc2 fired the ejection charge just before the R-DAS did. The parachute was wrapped too tightly and failed to inflate until an altitude of 150 ft. The rocket was damaged slightly upon landing. We maintained both tlemetry and video links during the entire flight. The rocket landed in a slight depression so we lost both links just after landing.
We successfully measured the magnitudes of the signals from the vibration sensors. The vibration due to the motor was much smaller in magnitude than expected. The principal mode was low enough in frequency that the R-DAS was able to record it without aliasing. It was just under 30 Hz during the launch phase and shifted to 40 Hz after the payload section separated from the main body. Sensor 0 near the midpoint of the rocket was the sensor that picked up the vibration most consistently. The vibrations due to ejection, the chute opening, and landing were large enough to saturate the DAQ. We will need to protect the inputs with limiting diodes or other means for the final design. The fin sensors registered little or no fin motion except at ejection, chute opening, and landing.
The video signal had occasional minor periods of static and the video quality was fair, but it successfully recorded the flight up and down. The GPS never acquired enough satellites to determine a position, but it was able to lock on to the GPS clock signal from at least one satellite. The primary launch goal was fully accomplished and most of the secondary goals were accomplished as well. The damage on landing prevented a successful Level One Cert., but overall the flight was a success.
