Next: Logistic Regression and Binary Up: Regression Analysis and Classification Previous: Bayesian Linear Regression
The goal of nonlinear least squares (LS) regresion is to
model the nonlinear relationship between the dependent variable
 and independent variables in
and independent variables in
![${\bf x}=[x_1,\cdots,x_d]^T$](img491.svg) ,
based on the given training dataset
,
based on the given training dataset
 ,
by a nonlinear regression function parameterized
by a set of
,
by a nonlinear regression function parameterized
by a set of  parameters represented by
parameters represented by
![${\bf\theta}=[\theta_1,\cdots,\theta_M]^T$](img501.svg) :
:
 |
(187) |
 for the model to fit the
training dataset
for the model to fit the
training dataset  , so that, its output
, so that, its output
 matches the ground truth labeling
matches the ground truth labeling  in the training set,
i.e., the residual
in the training set,
i.e., the residual
 is ideally zero:
where
is ideally zero:
where
 is the predicted output by the regression function based on the
nth data point
is the predicted output by the regression function based on the
nth data point  . We see that the regression problem
is equivalent to solving a nonlinear equation system of
. We see that the regression problem
is equivalent to solving a nonlinear equation system of  equations for the unknown parameters in
. As
typically there are many more data samples than the unknown
parameters, i.e.,
equations for the unknown parameters in
. As
typically there are many more data samples than the unknown
parameters, i.e.,  , the equation
, the equation
 is over-overconstrained without an exact solution. We therefore
consider the the optimal parameter
is over-overconstrained without an exact solution. We therefore
consider the the optimal parameter
 that minimizes
the sum-of-squared error based on the residual
that minimizes
the sum-of-squared error based on the residual  :
To do so, we first consider the gradient descent method based
on the gradient of this error function:
:
To do so, we first consider the gradient descent method based
on the gradient of this error function:
 is the
is the  Jacobian matrix
of
Jacobian matrix
of
 . The mth component
of the gradient vector is
. The mth component
of the gradient vector is
 is
the element in the nth row and mth column of ,
which is simply the negative version of Jacobian of
is
the element in the nth row and mth column of ,
which is simply the negative version of Jacobian of
 :
:
 |
(192) |
The optimal parameters in
that minimizes
 can now be found iteratively by the
gradient descent method:
can now be found iteratively by the
gradient descent method:
 |
(193) |
 properly may
be tricky, as it depends on the specific landscape of the
error hypersurface
. If
is too large, a minimum may be skipped over, but if
is too large, the convergence of the iteration may be too
slow.
properly may
be tricky, as it depends on the specific landscape of the
error hypersurface
. If
is too large, a minimum may be skipped over, but if
is too large, the convergence of the iteration may be too
slow.
This gradient method is also called
batch gradient descent (BGD), as the gradient in
Eq. (190) is calculated based on the entire batch
of all data points in the dataset in each
iteration. When the size of the dataset is large, BGD may
be slow due to the high computational complexity. In this
case the method of stochastic gradient descent (SGD)
can be used, which approximates the gradient based on only
one of the data points uniformly randomly chosen from
the dataset in each iteration, i.e., the summation in
Eq. (190) contains only one term corresponding to
the chosen sample :
 |
(194) |
 based on one data point is
the same as the true gradient (scaled by
based on one data point is
the same as the true gradient (scaled by  ) based on
all data points in the dataset
) based on
all data points in the dataset
![$\displaystyle E[ {\bf g}_n({\bf\theta}) ]
=\sum_{n=1}^N P({\bf x}_n) {\bf g}_n(...
...{N}\sum_{n=1}^N \frac{dr_n}{d{\bf\theta}}\;r_n
=\frac{1}{N}{\bf g}({\bf\theta})$](img913.svg) |
(195) |
As the data are typically noisy, the SGD gradient based on
only one data point may be in a direction very different
from the true gradient based on the mean of all data
points, and the resulting search path in the M-D space may
be in a very jagged zig-zag shape, and the iteration may
converge slowly. However, as the computational complexity
in each iteration is much reduced, we can afford to carry
out a large number of iterations with an overall search
path generally coinciding with that of the BGD method.
Some trade-off between BGD and SGD can be made so that the
gradient is estimated based on more than one but less than
all data points in the dataset, the resulting method,
called mini-batch gradient descent, can take advantage
of both methods. The methods of stochastic and mini-batch
gradient descent are widely used in machine learning, such
as in the method of artificial neural networks, which can
be treated as a nonlinear regression problem, considered
in a later chapter.
Alternatively, the optimal parameter
of
the nonlinear regression function
 can also be found by the Gauss-Newton method, which
directly solves the nonlinear over-determined equation system
can also be found by the Gauss-Newton method, which
directly solves the nonlinear over-determined equation system
 in Eq. (188), based on the iterative
Newton-Raphson method in Eq. (
in Eq. (188), based on the iterative
Newton-Raphson method in Eq. (![[*]](crossref.png) ) in
Chapter 2:
) in
Chapter 2:
 .
Here
.
Here
 in the pseudo-inverse is actually an
approximation of the Hessian
in the pseudo-inverse is actually an
approximation of the Hessian
 of the error
function
, as shown in the example
in a previous chapter,
and
of the error
function
, as shown in the example
in a previous chapter,
and
 is the gradient of the error function given in Eq. (190).
So the iteration above is essentially:
is the gradient of the error function given in Eq. (190).
So the iteration above is essentially:
 |
(197) |
 as the second order derivative of the error function
is approximated by the Jacobian
as the second order derivative of the error function
is approximated by the Jacobian
 as the first order derivative of the
regression function
as the first order derivative of the
regression function
 , making
the implementation computationally easier.
, making
the implementation computationally easier.
In the special case of linear regression function
 , we have:
, we have:
![$\displaystyle \hat{\bf y}={\bf f}({\bf X},{\bf w})
=\left[\begin{array}{c}f({\b...
...nd{array}\right]{\bf w}
=[{\bf x}_1,\cdots,{\bf x}_N]^T{\bf w}={\bf X}^T{\bf w}$](img925.svg) |
(198) |
![${\bf w}=[w_0,\,w_1,\cdots,w_d]^T$](img926.svg) and
and
![${\bf x}_i=[1, x_{i1},\cdots,x_{id}]^T$](img927.svg) are both augmented
are both augmented  dimensional vectors and
dimensional vectors and
![${\bf X}=[{\bf x}_1,\cdots,{\bf x}_N]$](img498.svg) .
The Taylor series is
.
The Taylor series is
 |
(199) |
 |
(200) |
 |
 |
 |
|
|
 |
||
|
 |
(201) |
 can be found in a single
step without iteration, same as that in Eq. (116).
can be found in a single
step without iteration, same as that in Eq. (116).
The Matlab code for the essential parts of the algorithm is
listed below, where data(:,1) and data(:,2) are the
observed data containing samples
 in the first
column and their corresponding function values
in the first
column and their corresponding function values
 in the second column. In the code segment below, the regression
function (e.g., an exponential model) is symbolically defined, and
then a function
in the second column. In the code segment below, the regression
function (e.g., an exponential model) is symbolically defined, and
then a function NLregression is called to estimate the
function parameters:
sym x; % symbolic variables
a=sym('a',[3 1]); % symbolic parameters
f=@(x,a)a(1)*exp(a(2)*x)+a(3)| % symbolic function
[a er]=NLregression(data(:,1),data(:,2),f,3); % call regression
The code below estimates the parameters of the regression
function based on Newton's method.
function [a er]=NLregression(x,y,f,M) % nonlinear regression
N=length(x); % number of data samples
a=sym('a',[M 1]); % M symbolic parameters
F=[];
for i=1:N
F=[F; f(x(i),a)]; % evaluate function at N given data points
end
J=jacobian(F,a); % symbolic Jacobian
J=matlabFunction(J); % convert to a true function
F=matlabFunction(F);
a1=ones(M,1); % initial guesses for M parameters
n=0; % iteration index
da=1;
while da>tol % terminate if no progress made
n=n+1;
a0=a1; % update parameters
J0=J(a0(1),a0(2)); % evaluate Jacobian based on a0
Jinv=pinv(J0); % pseudo inverse of Jacobian
r=y-F(a0(1),a0(2)); % residual
a1=a0+Jinv*r; % Newton iteration
er=norm(r); % residual error
da=norm(a0-a1); % progress
end
end
where tol is a small value for tollerance, such as  .
.
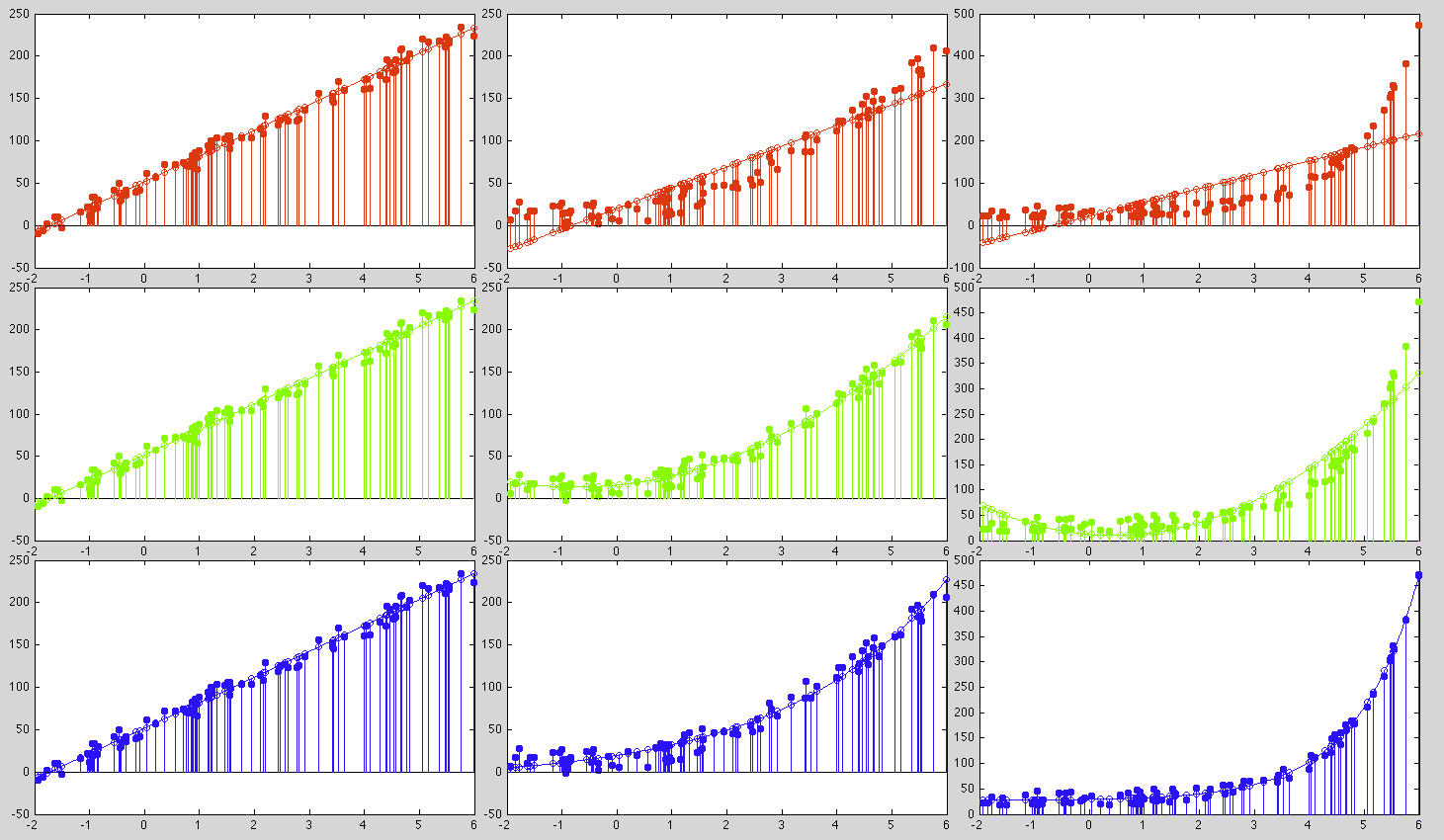
Example 1
Consider three sets of data (shown as the solid dots in the three columns in the plots below) are fitted by three different models (shown as the open circles in the plots):



These are the parameters for the three models to fit each of the three datasets:
 |
We see that the first dataset can be fitted by all three models equally
well with similar error (when
 in model 2, it is approximately
a linear functions), the second dataset can be well fitted by either the
second or the third model, while the third dataset can only be fitted
by the third exponential model.
in model 2, it is approximately
a linear functions), the second dataset can be well fitted by either the
second or the third model, while the third dataset can only be fitted
by the third exponential model.
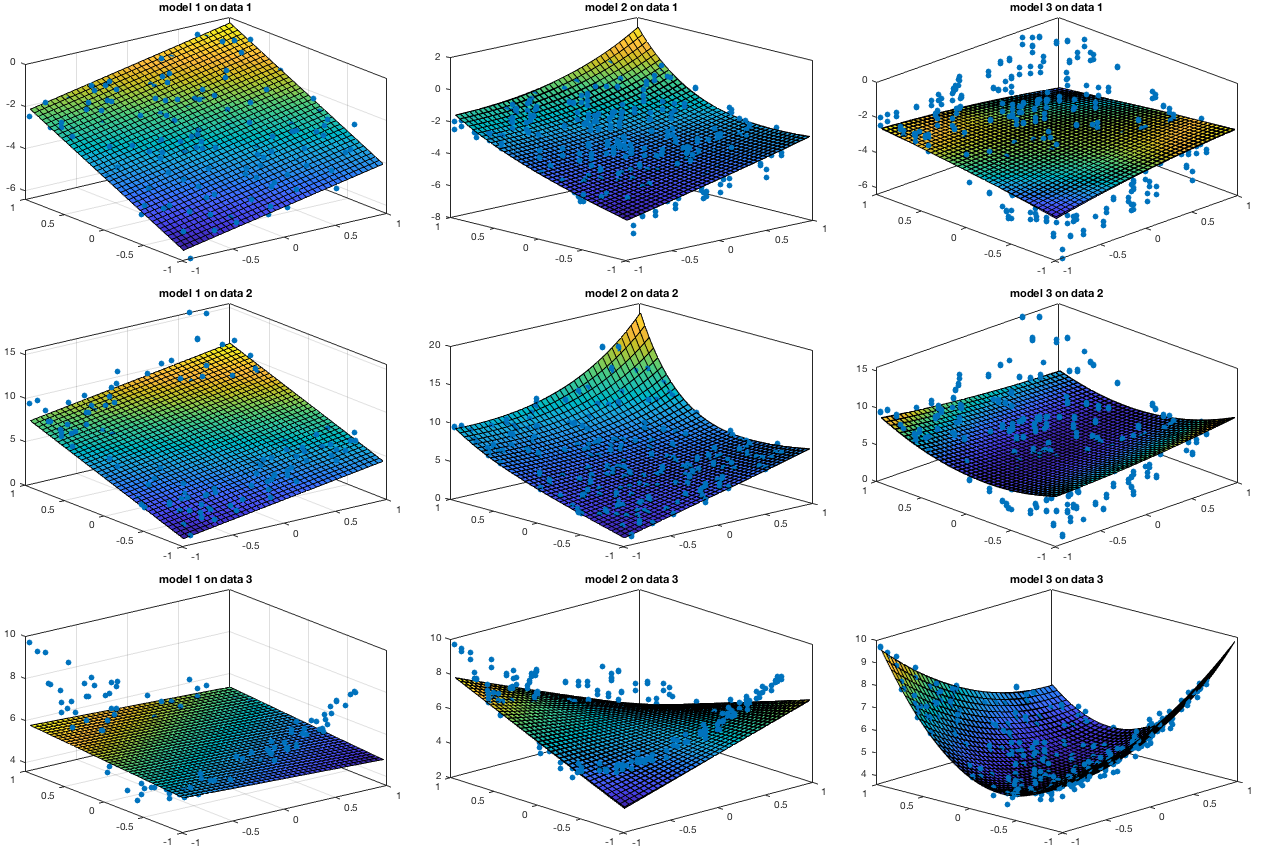
Example 2
Based on the following three functions with four parameters
 , three sets of 2-D data points are
generated (with some random noise added), shown in the figure
below as the dots in the three rows.
, three sets of 2-D data points are
generated (with some random noise added), shown in the figure
below as the dots in the three rows.
 |
|
 |
|
 |
|
 |
|
 |
|
 |
(202) |
Then each of three datasets are fitted by the three functions as models while the optimal parameters are found by the Gauss-Newton method.
 |
The Levenberg-Marquardt algorithm (LMA) or
damped least-squares method is a method widely
used to minimize a sum-of-squares error
 as
in Eq. (189). The LMA is an interpolation or trade-off
between the the gradient descent method based on the first
order derivative of the error function to be minimized, and
the Gauss-Newton method based on both the first and second
order derivatives of the error function, both discussed above.
As the LMA can take advantage of both methods and is therefore
more robust. Even if the initial guess is far from the solution
corresponding to the minimum of the objective function, the
iteration can still converge toward the solution.
as
in Eq. (189). The LMA is an interpolation or trade-off
between the the gradient descent method based on the first
order derivative of the error function to be minimized, and
the Gauss-Newton method based on both the first and second
order derivatives of the error function, both discussed above.
As the LMA can take advantage of both methods and is therefore
more robust. Even if the initial guess is far from the solution
corresponding to the minimum of the objective function, the
iteration can still converge toward the solution.
Specifically, the LMA modifies Eq. (196)
![$\displaystyle {\bf\theta}_{n+1}={\bf\theta}_n
+{\bf J}^-_f({\bf\theta}_n)[ {\bf...
...\bf J}_n^T{\bf J}_n)^{-1}{\bf J}_n^T
[ {\bf y}-{\bf f}({\bf X},{\bf\theta}_n) ]$](img950.svg) |
(203) |
 :
where
:
where
 is the non-negative damping factor, which is to
be adjusted at each iteration. We recognize that this is actaully
similar to Eq. (144) for ridge regression.
is the non-negative damping factor, which is to
be adjusted at each iteration. We recognize that this is actaully
similar to Eq. (144) for ridge regression.
In each iterative step, if  is small and the error
function
is small and the error
function
 decreases quickly, indicating
the Gauss-Newton is effective in the sense that the error fucntion
is well modeled as a quadratic function by the first and second
order terms of the Taylor series, we will keep small.
On the other hand, if
decreases slowly, indicating
the error function may not be well modeled as a quadratic function,
due possibly to the fact that the current
decreases quickly, indicating
the Gauss-Newton is effective in the sense that the error fucntion
is well modeled as a quadratic function by the first and second
order terms of the Taylor series, we will keep small.
On the other hand, if
decreases slowly, indicating
the error function may not be well modeled as a quadratic function,
due possibly to the fact that the current
 is far
away from the minimum, then we let take a large value,
so that the term
is far
away from the minimum, then we let take a large value,
so that the term
 becomes insignificant, and
Eq. (204) approaches
becomes insignificant, and
Eq. (204) approaches
 |
(205) |
is updated along the negative direction of
the gradient in Eq. (190):
 |
(206) |
 .
.
By adjusting the parameter , the LMA can switch between
either of the two methods for the same purpose of minimizing
. When the value of is small,
the iteration is dominated by the Gauss-Newton method that
approximate the error function by a quadratic function based
on the second order derivatives. If the error reduces slowly,
indicating the error function cannot be approximated by a
quadratic function, a greater value of is used to
switch to the gradient descent method.

![$\displaystyle \varepsilon({\bf\theta})=\frac{1}{2}\vert\vert{\bf r}\vert\vert^2
=\frac{1}{2}\sum_{n=1}^N r_n^2
=\frac{1}{2}\sum_{n=1}^N[y_n-f_n({\bf\theta})]^2$](img895.svg)


![$\displaystyle -\sum_{n=1}^N \frac{d}{d{\bf\theta}} f_n({\bf\theta})
[y_n-f_n({\bf\theta})] =-{\bf J}_f^T\;{\bf r}$](img898.svg)


![$\displaystyle \sum_{n=1}^N
\frac{\partial f_n({\bf\theta})}{\partial\theta_m}
[...
...,[f_n({\bf\theta})-y_n]
\sum_{n=1}^N J_{nm}\,r_n
\;\;\;\;\;\;\;\;(m=1,\cdots,M)$](img904.svg)

![$\displaystyle {\bf\theta}_{n+1}={\bf\theta}_n
+({\bf J}_n^T{\bf J}_n+\lambda{\bf I})^{-1}{\bf J}_n^T
[ {\bf y}-{\bf f}({\bf X},{\bf\theta}_n) ]$](img952.svg)