Next: Homogeneous Solution Up: Chapter 3: AC Circuit Previous: Impedance and Generalized Ohm's
In the previously discussed method for AC circuit analysis, all
voltages and currents are represented as phasors and all circuit
components (R, C, and L) are represented by their impedences,
so that we can solve the corresponding algebraic equations
to get the steady state responses of the circuit to an AC
voltage or current input. However, if we are also interested in
the transient response of the circuit to an input which is
turned on at time moment  , we need to solve the corresponding
differential equations to find its complete solution
as the sum of the homogeneous solution and its
particular solution.
, we need to solve the corresponding
differential equations to find its complete solution
as the sum of the homogeneous solution and its
particular solution.
As a simple example, the RC circuit shown below is composed of a
resistor  and capacitor
and capacitor  in series with an external voltage
input
in series with an external voltage
input  , which is turned on at , either by a switch or a
step voltage . We also assume the initial condition that the
voltage across is
, which is turned on at , either by a switch or a
step voltage . We also assume the initial condition that the
voltage across is
 at . Any of the variables
at . Any of the variables
 ,
,  , and
, and  can be considered as the circuit's
response to this input.
can be considered as the circuit's
response to this input.
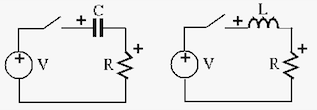
As shown in the figure, the polarity of  is positive on top,
and the polarities of
is positive on top,
and the polarities of  is positive on the left.
is positive on the left.
 |
(68) |
 is the time constant of the system with the
dimension of time:
is the time constant of the system with the
dimension of time:
![$\displaystyle [RC]=\frac{[V]}{[I]}\frac{[Q]}{[V]}=\frac{[Q]}{[I]}=[T]$](img244.svg) |
(69) |
 or or |
(70) |
 is the time constant with the dimension of time:
is the time constant with the dimension of time:
![$\displaystyle \frac{[L]}{[R]}=\frac{[V][T]}{[I]}\frac{1}{[R]}=\frac{[R][T]}{[R]}=[T]$](img248.svg) |
(71) |
In general, a first-order linear system with input
 and output
and output  can be described by a first-order
linear-constant coefficient differential equation (LCCDE)
in the canonic form:
can be described by a first-order
linear-constant coefficient differential equation (LCCDE)
in the canonic form:
 |
(72) |
 .
.
The solution of a DE represents the response (or output) of the circuit to both the external input and the initial state, and is composed of two parts: