Next: Solving equations by iteration Up: Solving Equations Previous: Solving Linear Equation Systems
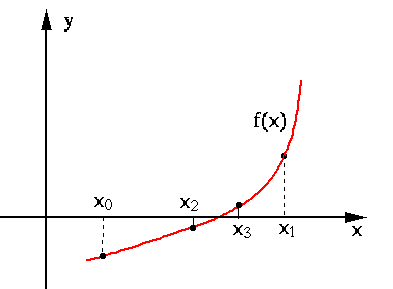
Here we consider a set of methods that find the solution  of a single-variable nonlinear equation
of a single-variable nonlinear equation  , by searching
iteratively through a neighborhood of the domain, in which
is known to be located.
, by searching
iteratively through a neighborhood of the domain, in which
is known to be located.
The bisection search
This method requires two initial guesses  satisfying
satisfying
 . As
. As  and
and  are on opposite sides
of the x-axis
are on opposite sides
of the x-axis  , the solution at which
, the solution at which  must
reside somewhere in between of these two guesses, i.e.,
must
reside somewhere in between of these two guesses, i.e.,
 .
.
Given such two end points  and
and  , we find another point
, we find another point  in between and use it to replace one of the end points at which the
function value
in between and use it to replace one of the end points at which the
function value  has the same sign as that of
has the same sign as that of  . The new
search interval is
. The new
search interval is  if
if
 , or
, or  if
if
 , either of which is smaller than the previous
interval
, either of which is smaller than the previous
interval
 . This process is then carried out iteratively
until the solution is eventually approached, with a guaranteed
convergence.
. This process is then carried out iteratively
until the solution is eventually approached, with a guaranteed
convergence.
While any point between the two end points can be chosen for the
next iteration, we want to avoid the worst possible case in which
the solution always happens to be in the larger of the two sections
 and
and  . We can therefore choose the middle point between the
two end points, i.e.,
. We can therefore choose the middle point between the
two end points, i.e.,
 , so that
, so that
 ,
i.e., the new search interval is always halved in each step of the
iteration:
,
i.e., the new search interval is always halved in each step of the
iteration:
Here, without loss of generality, we have assumed
 and
and  is replaced by
is replaced by  .
.
For example, we assume the root is located at  between
the two initial values are
between
the two initial values are  and
and  , then we get
, then we get
 |
(12) |

Note that the error
 does not necessarily always
reduce monotonically. However, as in each iteration the search
interval is always halved, the worst possible error is also halved:
does not necessarily always
reduce monotonically. However, as in each iteration the search
interval is always halved, the worst possible error is also halved:
 |
(13) |
 )
and the rate of convergence is
)
and the rate of convergence is  :
14
:
14
Compared to other methods to be considered later, the bisection method
converges rather slowly, but one of the advantages of the bisection
method is that no derivative of the given function is needed. This
means the given function does not need to be differentiable.
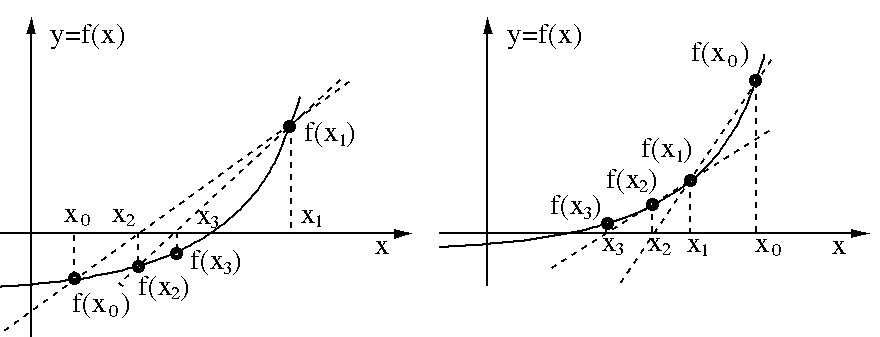
The Secant method
Same as in the bisection method, here again we assume there are two
initial values and available, but they do not have to satisfy
. Here the iteration is based on the zero-crossing of the
secant line passing through the two points and , instead
of their middle point. The equation for the secant is:
At the zero crossing, and the equation above can be solved
for  , the position of the zero-crossing:
, the position of the zero-crossing:
 |
(16) |
 is the finite difference that approximates
the derivative
is the finite difference that approximates
the derivative  :
:
 |
(17) |
obtained above, as a better estimate of the
root than either or , is used to replace one of them:
, then
 satisfying
satisfying
 is replaced by
is replaced by  (same as the bisection
method);
(same as the bisection
method);
 , then
with greater
, then
with greater
 is replaced by .
is replaced by .
 |
(18) |
In case
 , the approximated derivative is zero
, the approximated derivative is zero
 , and cannot be found. In such a case, a root
may exist between
, and cannot be found. In such a case, a root
may exist between  and . Therefore the way to resolve this
problem is to combine the bisection search with the secant method so that
when
and . Therefore the way to resolve this
problem is to combine the bisection search with the secant method so that
when
 , the algorithm will switch to bisection search. This is
Dekker's method:
, the algorithm will switch to bisection search. This is
Dekker's method:
 |
(19) |
We now consider the order of convergence of the secant method. Let be
the root at which . The error of is:
 |
 |
 |
|
|
 |
(20) |
 :
:
 |
(21) |
) and similarly
 |
(22) |
 above we get
above we get
|
|
![$\displaystyle \frac{e_{n-1}[f'(x^*)e_n+\frac{1}{2}f''(x^*)e_n^2+O(e_n^3)]-e_n[f...
...x^*)e_n^2+O(e_n^3)]-[f'(x^*)e_{n-1}+\frac{1}{2}f''(x^*)e_{n-1}^2+O(e_{n-1}^3)]}$](img133.svg) |
|
|
 |
||
|
 |
||
|
 |
(23) |
 , the lowest order terms in both the numerator
and denominator become the dominant terms as all other higher order terms
approach to zero, and we have
, the lowest order terms in both the numerator
and denominator become the dominant terms as all other higher order terms
approach to zero, and we have
 |
(24) |
 . To find the order of
convergence, we need to find
. To find the order of
convergence, we need to find  in
in
 |
(25) |
 we get
we get
 |
(26) |
we also have
 |
(27) |
 |
(28) |
 |
(29) |
 |
(30) |
 |
(31) |
 |
(32) |
 and the order of convergence is
and the order of convergence is  , which
is better than the linear convergence of the bisection search (which
does not use the information of the specific function ), but
worse than quadratic convergence of the Newton-Raphson method based
on the function derivative
, which
is better than the linear convergence of the bisection search (which
does not use the information of the specific function ), but
worse than quadratic convergence of the Newton-Raphson method based
on the function derivative  instead of the approximation
instead of the approximation
 , to be considered in the next section.
, to be considered in the next section.
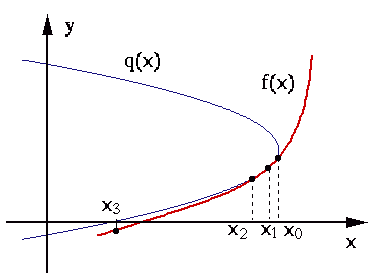
The inverse quadratic interpolation
Similar to the secant method that approximates the given function
by a straight line that goes through two consecutive points
 and
and
 , the inverse quadratic interpolation method
approximates the function by a quadratic curve that goes through three
consecutive points
, the inverse quadratic interpolation method
approximates the function by a quadratic curve that goes through three
consecutive points
 . As the function
may be better approximated by a quadratic curve rather than a straight line,
the iteration is likely to converge more quickly.
. As the function
may be better approximated by a quadratic curve rather than a straight line,
the iteration is likely to converge more quickly.
In general, any function  can be approximated by a quadratic
function
can be approximated by a quadratic
function  based on three points at
based on three points at
 ,
,
 , and
, and
 by the
Lagrange interpolation:
by the
Lagrange interpolation:
 |
(33) |
 to approximate the
inverse (horizontal) function
to approximate the
inverse (horizontal) function
 :
:
 |
(34) |
, the corresponding is the zero-crossing of
:
 |
(35) |
of . This expression
can then be converted into an iteration by which the next root estimate
is computed based on the previous three estimates at , ,
and  .
.
Brent's method
Brent's method combines the bisection method, secant method, and the method of inverse quadratic interpolation. In the iteration, a set of conditions is checked so that only the most suitable method under the current situation will be chosen to be used in the next iteration.


