Next: The Newton Polynomial Interpolation Up: Interpolation and Extrapolation Previous: Polynomial Interpolation
The polynomial  that fits a set of
that fits a set of  node points
node points
 can also be obtained by the
Lagrange interpolation:
can also be obtained by the
Lagrange interpolation:
 |
(15) |
 are the Lagrange basis polynomials of degree
are the Lagrange basis polynomials of degree  that
span the space of all nth degree polynomials:
that
span the space of all nth degree polynomials:
 |
(16) |
 , we get
, we get
 |
(17) |
 passes through all points:
passes through all points:
 |
(18) |
 at any other point
at any other point
 .
.
Specially, when  , i.e.,
, i.e.,
 , we get
an important property of the Lagrange basis polynomials:
, we get
an important property of the Lagrange basis polynomials:
 |
(19) |
Due to the uniqueness of the polynomial interpolation,
 , and they have the same error function
as in Eq. (12):
, and they have the same error function
as in Eq. (12):
 |
(20) |
The computational complexity for calculating one of the
basis polynomials
 is
is  and
the complexity for is
and
the complexity for is  for each
for each  . If
there are
. If
there are  samples for , then the total complexity
is
samples for , then the total complexity
is  .
.
To reduce the computational complexity, we express the
numerator of based on the (n+1)th degree polynomial
 defined in Eq. (7)
as
defined in Eq. (7)
as
 |
(21) |
can be found by evaluating
 at
at  :
:
 |
(22) |
 which leads to the last equality due to L'Hôpital's
rule. Now the Lagrange basis polynomial can be expressed as
which leads to the last equality due to L'Hôpital's
rule. Now the Lagrange basis polynomial can be expressed as
 |
(23) |
 is the barycentric weight, and the
Lagrange interpolation can be written as:
is the barycentric weight, and the
Lagrange interpolation can be written as:
 |
(24) |
for each
of the  samples of is (both for and the
summation), and the total complexity for all samples is
samples of is (both for and the
summation), and the total complexity for all samples is
 .
.
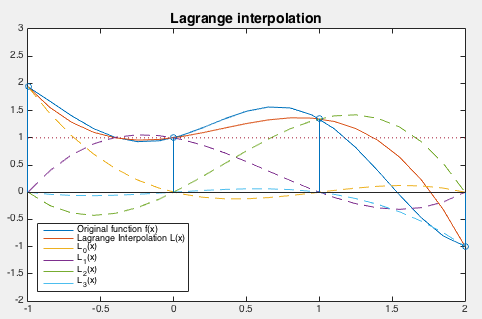
Example:
Approximate function
 by a
polynomial
by a
polynomial  of degree
of degree  , based on the following
, based on the following
 points:
points:
 |
Based on these points, we construct the Lagrange polynomials as
the basis functions of the polynomial space (instead of the power
functions in the previous example):
 |
 |
 |
|
 |
|
 |
|
 |
|
 |
|
 |
|
 |
 . The
interpolating polynomial can be obtained as a weighted sum
of these basis functions:
. The
interpolating polynomial can be obtained as a weighted sum
of these basis functions:
 |
 previously found based on the power basis
functions, with the same error
previously found based on the power basis
functions, with the same error
 .
.
The Matlab code that implements the Lagrange interpolation (both methods) is listed below:
function [v L]=LI(u,x,y) % Lagrange Interpolation
% vectors x and y contain n+1 points and the corresponding function values
% vector u contains all discrete samples of the continuous argument of f(x)
n=length(x); % number of interpolating points
k=length(u); % number of discrete sample points
v=zeros(1,k); % Lagrange interpolation
L=ones(n,k); % Lagrange basis polynomials
for i=1:n
for j=1:n
if j~=i
L(i,:)=L(i,:).*(u-x(j))/(x(i)-x(j));
end
end
v=v+y(i)*L(i,:);
end
end
function [v L]=LInew(u,x,y) % Lagrange interpolation
% u: data points; (x,y) sample points
n=length(x); % number of sample points
m=length(u); % number of data points
L=ones(n,m); % Lagrange basis polynomials
v=zeros(1,m); % interpolation results
w=ones(1,m); % omega(x)
dw=ones(1,n); % omega'(x_i)
for i=1:n
w=w.*(u-x(i));
for j=1:n
if j~=i
dw(i)=dw(i)*(x(i)-x(j));
end
end
end
for i=1:n
L(i,:)=w./(u-x(i))/dw(i);
v=v+y(i)*L(i,:);
end
end