Next: Multi-Class Classification Up: Support Vector machine Previous: Soft Margin SVM
The sequential minimal optimization (SMO, due to John Platt 1998, also see notes here) is a more efficient algorithm for solving the SVM problem, compared with the generic QP algorithms such as the internal-point method. The SMO algorithm can be considered as a method of decomposition, by which an optimization problem of multiple variables is decomposed into a series of subproblems each optimizing an objective function of a small number of variables, typically only one, while all other variables are treated as constants that remain unchanged in the subproblem. For example, the coordinate descent algorithm is just such a decomposition method, which solves a problem in a multi-dimensional space by converting it into a sequence of subproblems each in a one-dimensional space.
When applying the decomposition method to the soft margin SVM problem,
we could consider optimizing only one variable  at a time,
while treating all remaining variables
at a time,
while treating all remaining variables
 as constants. However, due to the constraint
as constants. However, due to the constraint
 ,
is a linear combination of
,
is a linear combination of  constants and is therefore
also a constant. We therefore need to consider two variables at a time,
here assumed to be and
constants and is therefore
also a constant. We therefore need to consider two variables at a time,
here assumed to be and  , while treating the remaining
, while treating the remaining
 variables as constants. The objective function of such a subproblem
can be obtained by dropping all constant terms independent of the two
selected variables and in the original objective
function in Eq. (131):
variables as constants. The objective function of such a subproblem
can be obtained by dropping all constant terms independent of the two
selected variables and in the original objective
function in Eq. (131):
 are replaced by the corresponding kernel
function
are replaced by the corresponding kernel
function
 with
with
 .
.
This maximization problem can be solved iteratively. Out of all
previous values
 , the two selected
variables are updated to their correspoinding new values
, the two selected
variables are updated to their correspoinding new values
 and
and
 that maximize
that maximize
 ,
subject to the two constraints.
,
subject to the two constraints.
We rewrite the second constraint as
 |
(136) |
 to get
where we have defined
to get
where we have defined  and
and
 . As
. As  is
independent of and , it remains the
same before and after they are updated, and we have
is
independent of and , it remains the
same before and after they are updated, and we have
 |
(138) |
We now consider a closed-form solution for updating and
in each iteration of this two-variable optimization
problem. We first rewrite Eq. (86) as
 |
(140) |
, now denoted by
 , can be written as
, can be written as
 |
 |
 |
|
|
 |
||
|
 |
(141) |
 |
(142) |
 . Now the objective function above can be written as:
. Now the objective function above can be written as:
 |
|
 |
(143) |
 (Eq. (139))
into
, we can rewrite it as a function of
a single variable alone:
(Eq. (139))
into
, we can rewrite it as a function of
a single variable alone:
 |
|
![$\displaystyle \delta+(1-s)\alpha_j
-\frac{1}{2}\left[ (\delta-s\alpha_j)^2K_{ii}
+\alpha_j^2K_{jj}+2s(\delta-s\alpha_j)\alpha_jK_{ij}\right]$](img504.svg) |
|
 |
|||
|
![$\displaystyle \frac{1}{2}(2K_{ij}-K_{ii}-K_{jj})\alpha_j^2
+[1-s+s\delta(K_{ii}-K_{ij})+y_j(v_i-v_j)]\alpha_j+$](img506.svg) Const. Const. |
(144) |
 , and scalar Const. represents all constant
terms independent of and and can therefore be
dropped. Now the objective function becomes a quadratic function of
the single variable . Consider the coefficients of this
quadratic function:
, and scalar Const. represents all constant
terms independent of and and can therefore be
dropped. Now the objective function becomes a quadratic function of
the single variable . Consider the coefficients of this
quadratic function:
 :
:
 |
(145) |
 is defined as
is defined as
 |
|
 |
|
|
 |
(146) |
:
 |
|||
|
 |
||
![$\displaystyle +y_j[(u_i-b-\alpha_iy_iK_{ii}-\alpha_jy_jK_{ij})-
(u_j-b-\alpha_iy_iK_{ij}-\alpha_jy_jK_{jj})]$](img516.svg) |
|||
|
 |
||
 |
|||
|
 |
||
|
 |
||
|
 |
(147) |
 |
(148) |
 and the
actual output based on the previous values of the variables
and the
actual output based on the previous values of the variables
 .
.
![$\displaystyle L(\alpha_j)=\frac{1}{2}\eta\alpha_j^2
+\left[y_j(E_i-E_j)-\alpha_j^{old}\eta\right]\alpha_j$](img525.svg) |
(149) |
in
the coefficients, we will find
that maximizes
 . Consider its first and second order derivatives:
. Consider its first and second order derivatives:
 |
|
 |
|
 |
|
 |
(150) |
is  , it
has a maximum. Solving the equation
, it
has a maximum. Solving the equation
 , we
get
that maximizes
based on the old
value
, we
get
that maximizes
based on the old
value
 :
:
 |
(151) |
Note that this is an unconstrained solution, which needs to be modified
if the constraints in Eq. (135) are violated. As shown in
the figure below, and are inside the square of
size  , due to the first constraint
, due to the first constraint
 ;
also, due to the second constraint
;
also, due to the second constraint
 (Eq. (137)), they have to be on the diagonal line
segment inside the square.
(Eq. (137)), they have to be on the diagonal line
segment inside the square.
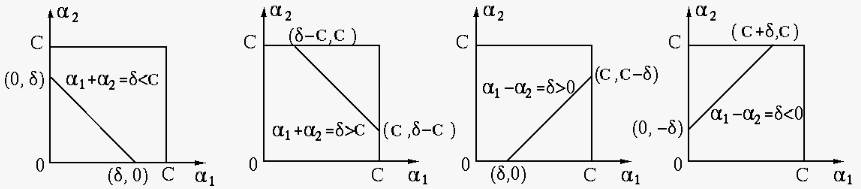
The four panels correspond to the four possible cases, depending
on whether  (
(
 , panels 1 and 2), or
, panels 1 and 2), or  (
(
 , panels 3 and 4), and whether
, panels 3 and 4), and whether  (panels
1 and 3) or
(panels
1 and 3) or  (panels 2 and 4), which can be further
summarized below in terms of the lower bound
(panels 2 and 4), which can be further
summarized below in terms of the lower bound  and upper bound
and upper bound
 of
of  :
:
, then
 ,
, then
,
, then
 (first panel)
, then
(first panel)
, then
 (second panel)
(second panel)
 |
(152) |
, then
 ,
,
 , then
, then
 (third panel)
(third panel)
 , then
, then
 (fourth panel)
(fourth panel)
 |
(153) |
Now we apply the constraints in terms of and to the optimial
solution
obtained previously to get that
is feasible as well as optmal:
 |
(154) |
based on Eq. (139):
 |
(155) |
 |
|
 |
|
|
 |
||
|
 |
(156) |
 .
To update
.
To update  , consider:
, consider:
 |
|
 |
|
|
 |
||
|
 |
(157) |
 for either
for either  or
or  , then
, then  according to Eq. (130). We let
according to Eq. (130). We let
 and
solve the equation above to get:
and
solve the equation above to get:
 or or |
(158) |
for both and , then
 .
.
 or
or
 for both and
for both and  ,
then
,
then  , and
, and
 , their average
, their average
 can be used.
can be used.
The computation above for maximizing
is
carried out iteratively each time when a pair of variables
and is selected to be updated. Specifically, we select a
variable that violates any of the KKT conditions given in
Eq. (130) in the outer loop of the SMO algorithm,
and then pick a second variable in the inner loop of the
algorithm, both to be optimized. The selection of these variables can
be either random (e.g., by following their order), or guided by some
heuristics, such as always choosing the variable with maximum step
size
 . This iterative
process is repeated until convergence when the KKT conditions are
satisfied by all
. This iterative
process is repeated until convergence when the KKT conditions are
satisfied by all
 variables, i.e., no
more variables need to be updated. All data points corresponding to
variables, i.e., no
more variables need to be updated. All data points corresponding to
 are the support vectors, based on which we can find
the offset by Eq. (133) and classify any unlabeled
point
are the support vectors, based on which we can find
the offset by Eq. (133) and classify any unlabeled
point  by Eq. (134).
by Eq. (134).
The Matlab code for the essential part of the SMO algorithm is listed below, based mostly on a simplified SMO algorithm and the related code with some modifications.
In particular, the if-statement
if (alpha(i)<C & yE<-tol) | (alpha(i)>0 & yE>tol)checks the three KKT conditions in Eq. (130), where
 and
and  is a small constant. The first half checks if
the first two of the three conditions are violated, while the second
half checks if the second two of the three conditions are violated.
is a small constant. The first half checks if
the first two of the three conditions are violated, while the second
half checks if the second two of the three conditions are violated.
[X y]=getData; % get training data
[m n]=size(X); % size of data
alpha=zeros(1,n); % alpha variables
bias=0; % initial bias
it=0; % iteration index
while (it<maxit) % number of iterations less than maximum
it=it+1;
changed_alphas=0; % number of changed alphas
N=length(y); % number of support vectors
for i=1:N % for each alpha_i
Ei=sum(alpha.*y.*K(X,X(:,i)))+bias-y(i);
yE=Ei*y(i);
if (alpha(i)<C & yE<-tol) | (alpha(i)>0 & yE>tol) % KKT violation
for j=[1:i-1,i+1:N] % for each alpha_j not equal alpha_i
Ej=sum(alpha.*y.*K(X,X(:,j)))+bias-y(j);
ai=alpha(i); % alpha_i old
aj=alpha(j); % alpha_j old
if y(i)==y(j) % s=y_i y_j=1
L=max(0,alpha(i)+alpha(j)-C);
H=min(C,alpha(i)+alpha(j));
else % s=y_i y_j=-1
L=max(0,alpha(j)-alpha(i));
H=min(C,C+alpha(j)-alpha(i));
end
if L==H % skip when L==H
continue
end
eta=2*K(X(:,j),X(:,i))-K(X(:,i),X(:,i))-K(X(:,j),X(:,j));
alpha(j)=alpha(j)+y(j)*(Ej-Ei)/eta; % update alpha_j
if alpha(j) > H
alpha(j) = H;
elseif alpha(j) < L
alpha(j) = L;
end
if norm(alpha(j)-aj) < tol % skip if no change
continue
end
alpha(i)=alpha(i)-y(i)*y(j)*(alpha(j)-aj); % find alpha_i
bi = bias - Ei - y(i)*(alpha(i)-ai)*K(X(:,i),X(:,i))...
-y(j)*(alpha(j)-aj)*K(X(:,j),X(:,i));
bj = bias - Ej - y(i)*(alpha(i)-ai)*K(X(:,i),X(:,j))...
-y(j)*(alpha(j)-aj)*K(X(:,j),X(:,j));
if 0<alpha(i) & alpha(i)<C
bias=bi;
elseif 0<alpha(j) & alpha(j)<C
bias=bj;
else
bias=(bi+bj)/2;
end
changed_alphas=changed_alphas+1; % one more alpha changed
end
end
end
if changed_alphas==0 % no more changed alpha, quit
break
end
I=find(alpha~=0); % indecies of non-zero alphas
alpha=alpha(I); % find non-zero alphas
Xsv=X(:,I); % find support vectors
ysv=y(I); % their corresponding indecies
end % end of iteration
nsv=length(ysv); % number of support vectors
where K(X,x) is a function that takes an  matrix
matrix
![${\bf X}=[{\bf x}_1,\cdots,{\bf x}_n]$](img585.svg) and an n-D vector
and produces the kernel functions
and an n-D vector
and produces the kernel functions
 as output.
as output.
function ker=K(X,x)
global kfunction
global gm % parameter for Gaussian kernel
[m n]=size(X);
ker=zeros(1,n);
if kfunction=='l'
for i=1:n
ker(i)=X(:,i).'*x; % linear kernel
end
elseif kfunction=='g'
for i=1:n
ker(i)=exp(-gm*norm(X(:,i)-x)); % Gaussian kernel
end
elseif kfunction=='p'
for i=1:n
ker(i)=(X(:,i).'*x).^3; % polynomial kernel
end
end
end
Having found all non-zero
and the corresponding
support vectors, we further find the offset or bias term:
bias=0;
for i=1:nsv
bias=bias+(ysv(i)-sum(ysv.*alpha.*K(Xsv,Xsv(:,i))));
end
bias=bias/nsv;
Any unlabeled data point is classified into class  or
or
 , depending on whether the following expression is greater or
smaller than zero:
, depending on whether the following expression is greater or
smaller than zero:
y=sum(alpha.*ysv.*K(Xsv,x))+bias;
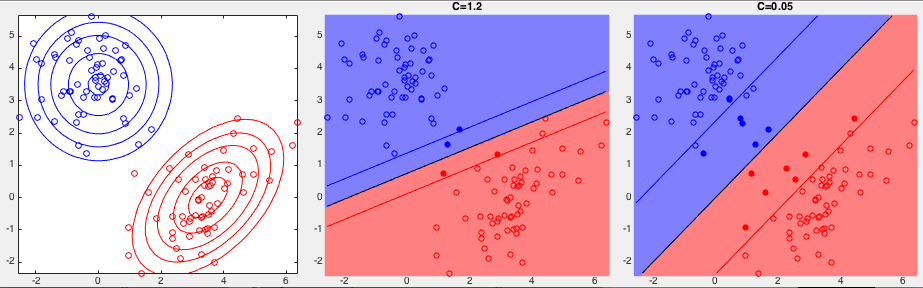
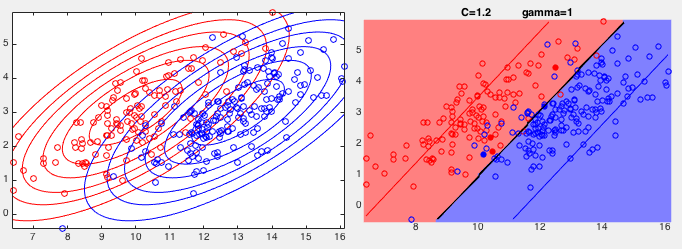
Example 1: The same training set used previously to test the SVM
with a hard margin is used again to test the SVM with a soft margin.
Two results are shown below, corresponding to two different values
 and
and  for the weight of the error term
for the weight of the error term
 in the objective function. We see that when is large, the number
of support vectors (the four solid dots) is small due to the small errors
in the objective function. We see that when is large, the number
of support vectors (the four solid dots) is small due to the small errors
 allowed, and the decision boundary determined by the these support
vectors independent of the rest of the data set (circles) is mostly
dictated by the local points close to the boundary, not necessarily a
good reflection of the global distribution of the data points. This
result is similar to the previous one generated by the hard-margin SVM.
allowed, and the decision boundary determined by the these support
vectors independent of the rest of the data set (circles) is mostly
dictated by the local points close to the boundary, not necessarily a
good reflection of the global distribution of the data points. This
result is similar to the previous one generated by the hard-margin SVM.
On the other hand, when  is small, a greater number of data points
become support vectors due to the larger (the 13 solid dots) error
allowed, and the resulting linear decision line determined by these support
vectors reflects global distribution of the data points, and it better
separates the two classes in terms of their mean positions.
is small, a greater number of data points
become support vectors due to the larger (the 13 solid dots) error
allowed, and the resulting linear decision line determined by these support
vectors reflects global distribution of the data points, and it better
separates the two classes in terms of their mean positions.
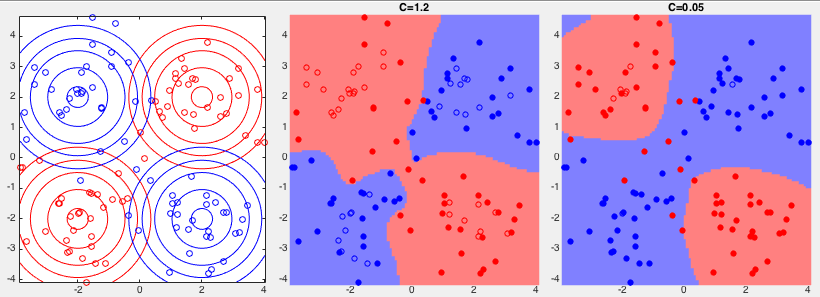
Example 2: The classification results for the XOR data set
are shown below with and . As the two classes in
the XOR data set are not linearly separable, a Gaussian or radial
basis function (RBF) kernel is used to map the data from 2-D space
to an infinite dimensional space, which is partitioned into two
regions for the two classes. When is large, the decision
boundary is dictated by a relatively small number of support vectors
(solid dots, with small error ) and all data points are
classified correctly, but it is more prone to the overfitting
problem, if some of the small number of support vectors are outliers
due to noise.
One the other hand, when is small, the decision boundary is
determined by a greater number of support vectors, better reflecting
the global distribution of the data points. However, as the local
points close to the boundary are not relatively deemphasized, some
miss-classification occurs, some nine red dots are classified into
the blue region incorrectly.
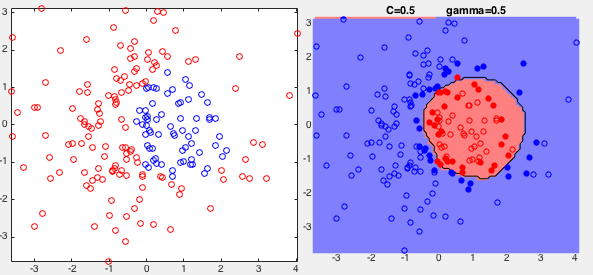
Example 3:
Example 4:






 i.e.
i.e.
