Only in the special case of LCCODE, can the equation be solved
analytically to obtain a closed-form solution as discussed above.
In the general case of nonlinear ODE systems, the closed-form
solutions no longer exist, and we can only solve such an equation
numerically based on a given initial condition  .
.
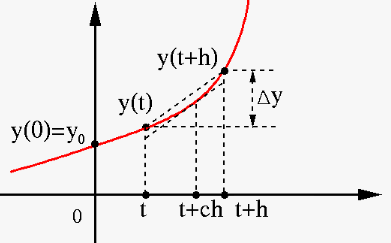
We first consider solving a first order ODE which can be
written in the explicit form:
 |
(179) |
This ODE can be solved iteratively, by estimating its next
value  from the previous one
from the previous one  :
:
where  is the step size,
is the step size,
 ,
,
 is a value between 0 and
is a value between 0 and  , and
, and
 |
(181) |
is the slope of the secant of the function through
the two and , which, according to the
mean value theorem, is equal to the derivative of the
function at some point  inside the interval
inside the interval ![$[t,\;t+h]$](img476.svg) .
.
However, as the slope  of the secant is unknown,
all methods considered below approximate from
based on certain estimated slope of the secant between
and :
of the secant is unknown,
all methods considered below approximate from
based on certain estimated slope of the secant between
and :
 |
(182) |
The goal is to minimize the error, represented as a kth power
function of the step size :
error |
(183) |
As  is small, the higher the order
is small, the higher the order  of the error term,
the more accurate a method is.
of the error term,
the more accurate a method is.
Eq. (180) can be expressed as an iteration:
 |
(184) |
where  ,
,
 ,
,
 ,
,
 , and
, and
 .
.
We further note that the increment
in Eq. (180) can also be obtained as an
integration based on the given
 , by the
method of
Newton-Cotes quadrature:
, by the
method of
Newton-Cotes quadrature:
 |
(185) |
However, we note that in these equations, function values
such
 and are
unknown and need to be estimated so that the error is minimized.
and are
unknown and need to be estimated so that the error is minimized.
 trapezoidal rule based on two points:
trapezoidal rule based on two points:
![$\displaystyle \int_t^{t+h} y'(\tau)\,d\tau\approx \frac{h}{2}[y'(t)+y'(t+h)]
=\frac{h}{2}[f(t,y(t))+f(t+h,y(t+h))]$](img491.svg)
 Simpson's rule based on three points:
Simpson's rule based on three points:


![$\displaystyle \frac{h}{6}[y'(t)+4 y'(t+h/2)+y'(t+h)]$](img495.svg)

![$\displaystyle \frac{h}{3}[f(t,y(t))+4 f(t+h/2,y(t+h/2))+f(t+h,y(t+h))]$](img496.svg)
 Simpson's 3/8 rule based on four points:
Simpson's 3/8 rule based on four points:
![$\displaystyle \frac{h}{8}[y'(t)+3y'(t+h/3)+3y'(t+2h/3)+y'(t+h)]$](img498.svg)
![$\displaystyle \frac{h}{8}[f(t,y(t))+3f(t+h/3,y(t+h/3))+3f(t+2h/3,y(t+2h/3))
+f(t+h,y(t+h))]$](img499.svg)


