Next: Multi-step methods Up: ch5 Previous: Solving First Order ODEs
The slope of the secant through  and
and  can be
approximated by
can be
approximated by  ,
,  , or, more accurately, the
average of the two:
, or, more accurately, the
average of the two:
 . Correspondingly, we
have the following three methods:
. Correspondingly, we
have the following three methods:
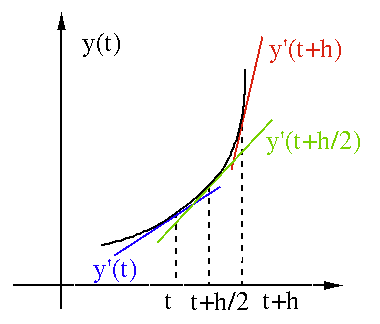
This method uses the derivative at the beginning of
the interval ![$[t,\;t+h]$](img476.svg) to approximate the increment
to approximate the increment
 :
:
:
we see that this method has a second order truncation error  .
.
If the step size  is not small enough, this truncation error
will accumulate as the iterative process progresses, and
is not small enough, this truncation error
will accumulate as the iterative process progresses, and  so
generated may deviate from the true solution quickly in
a few steps. Consequently, the iteration may become divergent
so
generated may deviate from the true solution quickly in
a few steps. Consequently, the iteration may become divergent
 , i.e., the method may not be stable.
Therefore Euler's method is useful only if the step size is
sufficiently small, so that the error does not accumulate too
quickly.
, i.e., the method may not be stable.
Therefore Euler's method is useful only if the step size is
sufficiently small, so that the error does not accumulate too
quickly.
This method uses the derivative at the end of the interval
to approximate the increment
:
in the expression by its Taylor expansion:
 |
(192) |
 |
(193) |
. As the desired function value appears on both
sides of Eq. (191), this method is implicit,
instead of explicit, as needs to be found by solving
the following equation for  treated as the unknown:
treated as the unknown:
 |
(194) |
 :
:
 where where |
(195) |
Obviously this method is more computationally expensive, however, as an implicit method, it is always stable compared to the forward method, as shown below.
This method uses the average of the derivatives at the beginning
and end points of the interval as an estimate of
the slope of the secant:
 |
(196) |
 |
|||
![$\displaystyle =y(t)+\frac{h}{2}\,[f(t,\,y(t))+f(t+h,\,y(t+h))]$](img520.svg) |
(197) |
 |
 |
![$\displaystyle y(t)+\int_t^{t+h} y'(\tau)\,d\tau
=y(t)+\frac{h}{2}\,[y'(t)+y'(t+h)]$](img521.svg) |
|
|
![$\displaystyle y(t)+\frac{h}{2}\,[f(t,\,y(t))+f(t+h,\,y(t+h))]$](img522.svg) |
(198) |
 |
(200) |
To find the order of the truncation error, we replace
in the equation by its Taylor expansion
 and rewrite the equation
above as
and rewrite the equation
above as
 |
|
 |
|
|
![$\displaystyle y(t)+\frac{h}{2}\,y'(t)+\frac{h}{2}\,[y'(t)+h y''(t)+O(h^2)]$](img528.svg) |
||
|
 |
(201) |
 , one order higher than either the forward or backward
method.
, one order higher than either the forward or backward
method.
Same as the backward method, this traperoidal method is also
implicit. To find , we need to solve the following
equation:
 |
(202) |
In summary, here is how the three methods find the increment of
function :
 |
(203) |

 |
(204) |
Example: Consider a simple first order constant coefficient DE:
 i.e. i.e. |
(205) |
 and initial condition
and initial condition  . The closed
form solution of this equation is known to be
. The closed
form solution of this equation is known to be
 ,
which decays exponentially to zero when
,
which decays exponentially to zero when
 .
This DE can be solved numerically by each of the three methods.
.
This DE can be solved numerically by each of the three methods.
 i.e.,
i.e.,
 or
or
 . If the step size is greater
than
. If the step size is greater
than  , iteration will diverge.
, iteration will diverge.
 |
(207) |
 we get
we get
 |
(209) |
we get
with  and
and  .
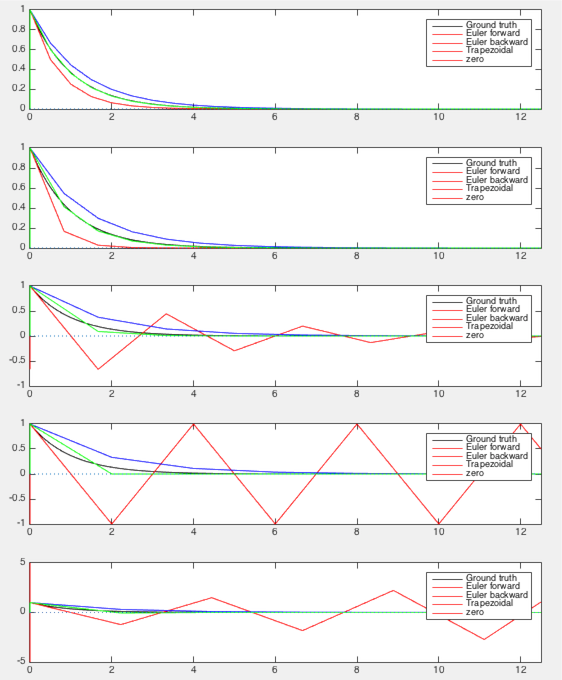
The four plots correspond to five different step sizes
.
The four plots correspond to five different step sizes
 .
.
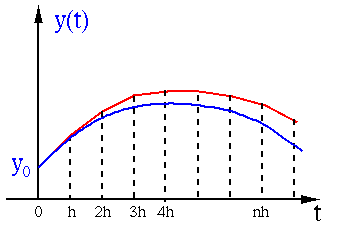
We make the following observations:
 used in the forward method, but under estimate by
used in the forward method, but under estimate by
 used by the backward method. As the average of the
two, the result of the trapezoidal method coincide with the
true solution more closely.
, while the performance of the forward
method is very sensitive to the step size . In particular,
when
used by the backward method. As the average of the
two, the result of the trapezoidal method coincide with the
true solution more closely.
, while the performance of the forward
method is very sensitive to the step size . In particular,
when
 , the iteration becomes divergent.
, the iteration becomes divergent.
In general there are two different types of approaches to
estimate some value in the future, such as the next function
value
 :
:
and  . Such a method may
be divergent and therefore unstable (the iteration grows
out of bound);
, as well as the present and
past information such as and . Such a method
is in general stable.
. Such a method may
be divergent and therefore unstable (the iteration grows
out of bound);
, as well as the present and
past information such as and . Such a method
is in general stable.
We further consider the Midpoint method which uses
the midpoint  between the two end point and
. Consider the Taylor series expansion of :
between the two end point and
. Consider the Taylor series expansion of :
 |
(211) |
 |
(212) |
 is:
is:
 |
(213) |
 |
(214) |
we get
 |
(215) |
is one order higher than that
of either Euler's forwar or backward method.
This equation can be expressd iteratively:
 |
(216) |
 of the function on the
right-hand side can be approximated by the first two terms of
its Taylor expansion:
of the function on the
right-hand side can be approximated by the first two terms of
its Taylor expansion:
 |
(217) |
 |
(219) |



![$\displaystyle y_{n+1}=y_n+\frac{h}{2}[ f(t_n,\,y_n)+f(t_n+h,\,y_n+hf_n) ]
=y_n+h\left(\frac{1}{2}k_1+\frac{1}{2}k_2\right)$](img523.svg)





