Next: Temporal Difference (TD) Algorithms Up: Model-Free Evaluation and Control Previous: Model-Free Evaluation and Control
We first consider a simple problem of evaluating an
existing policy  in terms of its value function
in terms of its value function
![$v_\pi(s)=E[\,G_t\;]$](img255.svg) at state
at state  , the expectation
of return
, the expectation
of return  , which can be obtained in the model-based
case by the Bellman equation in
Eq. (24):
, which can be obtained in the model-based
case by the Bellman equation in
Eq. (24):
 of all possible next states each
weighted by the corresponding transition probability
of all possible next states each
weighted by the corresponding transition probability
 , which is no longer available now in the
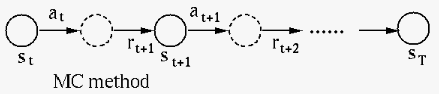
model-free case. We can still find the value function
based on the MC method by running multiple sample episodes
in the environment, and estimate
, which is no longer available now in the
model-free case. We can still find the value function
based on the MC method by running multiple sample episodes
in the environment, and estimate  as the average
of the actual returns , which in turn can be calculated
as the sum of discounted rewards
as the average
of the actual returns , which in turn can be calculated
as the sum of discounted rewards
 from
the current state onward to the terminal state
from
the current state onward to the terminal state
 , found at the end of the episode (assumed to have
finite horizon).
, found at the end of the episode (assumed to have
finite horizon).
This method has two versions, first-visit and every-visit, depending on whether only the first or every visit to a state in the trajectory of an episode is counted in calculation of the return. The pseudo code below is for first-visit version due to the if statement, which can be removed for the every-visit version.
to be evaluated
![$G_t=[\;\;]$](img258.svg) (empty lists) for all
(empty lists) for all
 to get sample data:
to get sample data:


 (for each step)
(for each step)

 (first visit)
(first visit)
![$G_t=[G_t,G]$](img265.svg) (append
(append  to list )
to list )

In the every-visit case, all sample returns from
multiple visits to state  are used, although they
may be correlated and not independent of each other,
i.e., they are not necessarily i.i.d. samples and their
average may be biased. This problem can be avoided in
the first-visit case, where only the returns of the first
visit to each state are counted as independent samples
drawn from the same distribution, and their average is not
biased. However, as only a fraction of the sample points
collected is used in the calculation of the returns, the
cost of this unbiased estimation is its high variance,
which can be reduced only if a large number of episodes
are used to get enough samples for a more statistically
reliable average. This is the typical trade-off between
variance and bias errors.
are used, although they
may be correlated and not independent of each other,
i.e., they are not necessarily i.i.d. samples and their
average may be biased. This problem can be avoided in
the first-visit case, where only the returns of the first
visit to each state are counted as independent samples
drawn from the same distribution, and their average is not
biased. However, as only a fraction of the sample points
collected is used in the calculation of the returns, the
cost of this unbiased estimation is its high variance,
which can be reduced only if a large number of episodes
are used to get enough samples for a more statistically
reliable average. This is the typical trade-off between
variance and bias errors.
In the code above, the function average finds the average of all elements of a list, only when all sample returns are available at the end of each episode. A more computationally efficient method (in terms of both space and complexity) is to find the average incrementally as in Eq. (49). Based on this incremental average, policy evaluation in terms of both the state and action values can also be carried out by the code below:
 to get
to get
 (for each step)
is visited the first time
(for each step)
is visited the first time

 to get
to get
 pairs visited
is visited the first time
pairs visited
is visited the first time

We next consider the MC algorithm for model-free control,
based on the generalized policy iteration of alternating
and interacting policy evaluation and policy improvement.
Specifically, while sampling the environment by following
an existing policy the action value  ,
instead of the state value , is gradually learned
and the policy is gradually improved at the same time. This
iteration will converge to the optimal policy at the limit
when the number of iterations goes to infinity.
,
instead of the state value , is gradually learned
and the policy is gradually improved at the same time. This
iteration will converge to the optimal policy at the limit
when the number of iterations goes to infinity.
The pseudo code for this lgorithm is listed below.
 , and a policy
, and a policy
 soft (arbitrarily)
to get
soft (arbitrarily)
to get

 is visited the first time
is visited the first time




 -greedy policy
-greedy policy  is based on
action value function
is based on
action value function  (maximized by the greedy
action). Through out the iteration, the policy is modified
following the action value function, while at the same time
the action value function is modified based on the policy,
until the process converges to the desired optimality.
(maximized by the greedy
action). Through out the iteration, the policy is modified
following the action value function, while at the same time
the action value function is modified based on the policy,
until the process converges to the desired optimality.
We note that the optimal policy  obtained by the
algorithm above is not completely deterministic due to
the -greedy approach, but it is said to be
near-deterministic as the greedy action is favored
over other non-greedy actions.
obtained by the
algorithm above is not completely deterministic due to
the -greedy approach, but it is said to be
near-deterministic as the greedy action is favored
over other non-greedy actions.