Next: Matrix norms
Up: algebra
Previous: Pseudo-inverse
In general, the ``size'' of a given variable  can be represented by
its norm
can be represented by
its norm  . Moreover, the distance between two variables and
. Moreover, the distance between two variables and
 can be represented by the norm of their difference
can be represented by the norm of their difference  . In
other words, the norm of is its distance to the origin
. In
other words, the norm of is its distance to the origin  of the
space in which exists.
of the
space in which exists.
Specifically, the norm is defined according to the space in
which the variable exists:
- In 1-D real axis, the norm of a real number
 is
its absolute value
is
its absolute value  , its distance to the origin.
, its distance to the origin.
- In 2-D complex plane, the norm of a complex number
 is its modulus
is its modulus
 , its Euclidean
distance to the origin.
, its Euclidean
distance to the origin.
- In N-D space (
 ), the norm of a vector
), the norm of a vector
![${\bf x}=[x_1,\cdots,x_N]^T$](img468.png) can be defined as its Euclidean distance to the origin of the space.
can be defined as its Euclidean distance to the origin of the space.
The concept of norm can also be generalized to other forms of variables,
such a function  , and an
, and an  matrix
matrix  .
.
Although vector norm is generally defined as
 , other alternative
forms of norm are also widely used to measure the size of a vector.
, other alternative
forms of norm are also widely used to measure the size of a vector.
Definition
The norm of a vector  in vector space
in vector space  is a real
non-negative value representing intuitively the length, size, or magnitude
of the vector. Specifically, the norm of must satisfy the
following three conditions:
is a real
non-negative value representing intuitively the length, size, or magnitude
of the vector. Specifically, the norm of must satisfy the
following three conditions:
- Positivity:
- Homogeneity:
- Triangle inequality:
The triangle inequality can also be expressed in alternative forms.
Replacing  by
by
 we get
we get
Also, subtracting  from both sides, and defining
from both sides, and defining
 (so that
(so that
 ), we get
), we get
which holds for either
 or
or
 ,
and can be further written as
,
and can be further written as
Combining the two results above, we get
Definition
Two norms  and
and
 are equivalent if there
exist two positive real constants
are equivalent if there
exist two positive real constants  and
and  so that
so that
Theorem
All different norms  are equivalent.
are equivalent.
Proof
- We first show that equivalence is transitive, i.e., if both
 and
and  are equivalent to
are equivalent to  :
:
then they are equivalent to each other.
From the first equation we get
 and
and
 , which, when substituted, respectively,
into the left and right hand sides of the second equation, yield:
, which, when substituted, respectively,
into the left and right hand sides of the second equation, yield:
indicating and are indeed equivalent.
- We next show an arbitrary norm is equivalent to
This is obviously true if
 therefore
therefore
 .
For
.
For
 and therefore
and therefore
 , we can always normalize
to define a new vector
, we can always normalize
to define a new vector
 with
with
 ,
so that the equation above becomes
,
so that the equation above becomes
which is all we need to prove.
- We now prove that an arbitrary is a continuous function of
over , i.e., for any
 , there exists a
, there exists a
 so that
so that
Both and  can be expressed in terms of a basis
can be expressed in terms of a basis
 that spans the space:
that spans the space:
then we have
Now consider the alternative form of the triangle inequality of :
If we let
 , the above becomes
, the above becomes
indicating that for any given  , we can choose
, we can choose
 so that if
so that if
 ,
then
,
then
 , i.e., the norm
is indeed continuous over .
, i.e., the norm
is indeed continuous over .
- Finally, according to the
extreme value theorem,
a continuous function, such as , defined over a compact
(closed and bounded) set, such as the unit sphere
in the
n-D space, must have its maximum and minimum values:
i.e.,
 , which is what we need to prove.
, which is what we need to prove.
Q.E.D.
Here are some examples of common vector norms:
- If the vector
 is a real number, then its norm
is simply its absolute value
is a real number, then its norm
is simply its absolute value
 .
.
- If the vector
 is a complex number, then
its norm is simply its modulus
is a complex number, then
its norm is simply its modulus
 .
.
- If
![${\bf x}=[x_1,\cdots,x_n]^T$](img199.png) is a vector in an n-D vector space
is a vector in an n-D vector space
 or
or
 , then we can use the p-norms
defined as
, then we can use the p-norms
defined as
The p-norm so defined satisfies the three requirements in the definition
of the vector norm. The first two are trivially obvious, while the third
one happens to be Minkowski's inequality (see appendix):
- if
 is a function, its p-norm is defined as
is a function, its p-norm is defined as
The commonly used p-norms are for  ,
,  , and
, and  :
:
- The absolute sum of all
 elements:
elements:
- Euclidean norm:
- The maximum absolute value of all elements:
Out of the three vector norms, the Euclidean 2-norm represents the
geometric length of a vector in 2 or 3-D space, which is conserved, or
invariant, under rotation, a unitary transform
 by an orthogonal (orthogonal if in real field) matrix satisfying
by an orthogonal (orthogonal if in real field) matrix satisfying
 or
or
 :
:
i.e.,
 , rotation does not change the length
of a vector.
, rotation does not change the length
of a vector.
Definition The distance between two points
 in a vector space is defined as the norm of the difference
in a vector space is defined as the norm of the difference
 .
.
- (city block or Manhattan distance):
- (Euclidean distance):
- (Chebyshev distance):
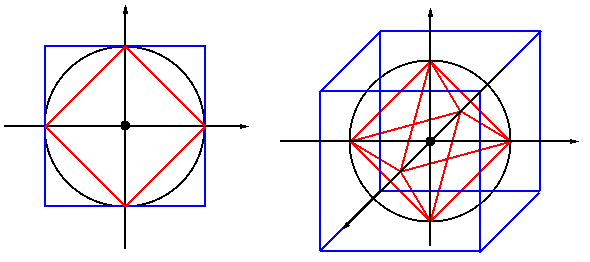
The three unit circles or spheres, are formed by all points of
unity norm
 with unity distance to the origin (blue, black,
and red for
with unity distance to the origin (blue, black,
and red for  ,
,  , and
, and  , respectively).
, respectively).
Next: Matrix norms
Up: algebra
Previous: Pseudo-inverse
Ruye Wang
2015-04-27