All previously discussed methods of polynomial interpolation fit
a set of  given points
given points
 by an
nth degree polynomial, and a higher degree polynomial is needed to
fit a larger set of data points. A major drawback of such methods
is overfitting, as domonstrated by the following example.
by an
nth degree polynomial, and a higher degree polynomial is needed to
fit a larger set of data points. A major drawback of such methods
is overfitting, as domonstrated by the following example.
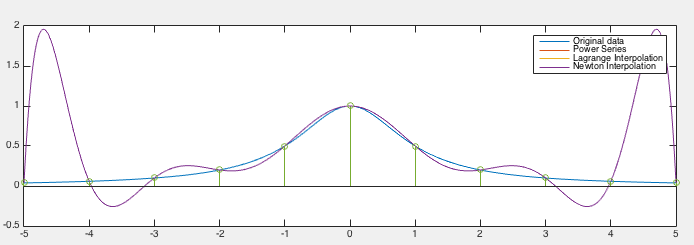
Example:
Vased on  equally spaced points from
equally spaced points from  to
to  with increment of 1, a function
with increment of 1, a function
 can be approximated
by any of the interpolation methods discussed above by polynomial
of degree
can be approximated
by any of the interpolation methods discussed above by polynomial
of degree  , as shown in the figure below. We note that the
approximation is very poor towards to the two ends where the error
, as shown in the figure below. We note that the
approximation is very poor towards to the two ends where the error
 is disappointingly high. This is known as
Runge's phenomenon, indicating the fact that higher degree
polynomial interpolation does not necessarily always produce more
accurate result, as the degree of the interpolating polynomial may
become unnecessarily high and the polynomial may become oscillatory.
is disappointingly high. This is known as
Runge's phenomenon, indicating the fact that higher degree
polynomial interpolation does not necessarily always produce more
accurate result, as the degree of the interpolating polynomial may
become unnecessarily high and the polynomial may become oscillatory.
This Runge's phenominon is a typical example of overfitting, due to
an excessively complex model with too many parameters relative to the
observed data, here specifically a polynomial of a degree too high
(requiring too many coefficients) to model the given data points.
Now we consider a different method of spline interpolation, which
fits the given points by a piecewise polynomial function  ,
known as the spline, a composite function formed by
,
known as the spline, a composite function formed by  low-degree polynomials
low-degree polynomials  each fitting
each fitting  in the interval
between
in the interval
between  and
and
 :
:
 |
(61) |
As this method does not use a single polynomial of degree to
fit all points at once, it avoids high degree polynomials
and thereby the potential problem of overfitting.
These low-degree polynomials need to be such that the spline
they form is not only continuous but also smooth.
In the following we consider approximating between any
two consecutive points  and
and  by a linear, quadratic,
and cubic polynomial (of first, second, and third degree).
by a linear, quadratic,
and cubic polynomial (of first, second, and third degree).
Example:
A function
 is sampled at the
following
is sampled at the
following  points:
points:
The interpolation results based on linear, quadratic and cubic
splines are shown in the figure below, together with the original
function , and the  interpolating polynomials
interpolating polynomials
 , used as the ith segment of
between and .
, used as the ith segment of
between and .
For the quadratic interpolation, based on
 we get
we get
 . For the cubic
interpolation, we solve the following equation
. For the cubic
interpolation, we solve the following equation
and get
 .
.
The errors of these three methods are
 ,
,
 , and
, and
 , respectively. Obviously
the higher the degree of the interpolating polynomial, the
higher the accuracy. The error of the cubic spline method is
significantly smaller than
, respectively. Obviously
the higher the degree of the interpolating polynomial, the
higher the accuracy. The error of the cubic spline method is
significantly smaller than
 of the polynomial
interpolation.
of the polynomial
interpolation.

The Matlab code that implements the cubic spline method is listed below.
function [S C]=Spline3(u,x,y,dya,dyb)
% vectors x and y contain n+1 points and the corresponding function values
% vector u contains all discrete samples of the continuous argument of f(x)
% dya and dyb are the derivatives f'(x_0) and f'(x_n), respectively
n=length(x); % number of interpolating points
k=length(u); % number of discrete sample points
C=zeros(n,k); % the n-1 cubic interpolating polynomials
A=2*eye(n); % coefficient matrix on left-hand side
A(1,2)=1;
A(n,n-1)=1;
d=zeros(n,1); % vector on right-hand side
d(1)=((y(2)-y(1))/(x(2)-x(1))-dya)/h0; % first element of d
for i=2:n-1
h0=x(i)-x(i-1);
h1=x(i+1)-x(i);
h2=x(i+1)-x(i-1);
A(i,i-1)=h0/h2;
A(i,i+1)=h1/h2;
d(i)=((y(i+1)-y(i))/h1-(y(i)-y(i-1))/h0)/h2; % 2nd divided difference
end
d(n)=(dyb-(y(n)-y(n-1))/h1)/h1; % last element of d
M=6*inv(A)*d; % solving linear equation system for M's
for i=2:n
h=x(i)-x(i-1);
x0=u-x(i-1);
x1=x(i)-u;
C(i-1,:)=(x1.^3*M(i-1)+x0.^3*M(i))/6/h... % the ith cubic polynomial
-(M(i-1)*x1+M(i)*x0)*h/6+(y(i-1)*x1+y(i)*x0)/h;
idx=find(u>x(i-1) & u<=x(i)); % indices between x(i-1) and x(i)
S(idx)=C(i-1,idx); % constructing spline by cubic polynomials
end
end
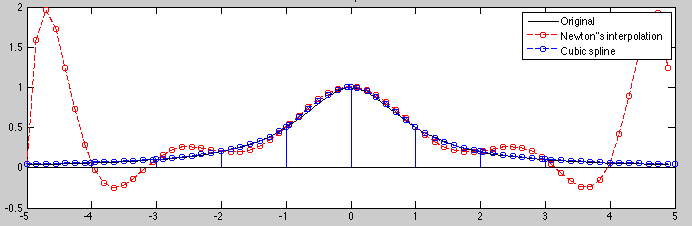
Example:
The function
used before is now approximated by both
the Newton's method and the cubic spline method, with very different
results as shown below. The Runge's phenomenon suffered by Newton's
method is certainly avoided by the cubic spline method.
 must join at
must join at 


 . The higher the order
. The higher the order  with two parameters
with two parameters
 and
and  can only satisfy the following two equations
required for
can only satisfy the following two equations
required for 
 and
and
 :
:





 and
and
 in the second
expression.
in the second
expression.
 , the linear spline
, the linear spline 
 .
.
 with three parameters
with three parameters  and
and
 can satisfy the following three equations required for
can satisfy the following three equations required for
 ) as well as continuous:
) as well as continuous:

 ,
we consider
,
we consider
 , which, as a linear function, can
be linearly fit by the two end points
, which, as a linear function, can
be linearly fit by the two end points
 and
and
 :
:


 , we have
, we have



 , we have
, we have


 , we can get iteratively all subsequent
, we can get iteratively all subsequent
 and thereby
and thereby  , we can also get iteratively all previous
, we can also get iteratively all previous
 . It is obvious that with only three free
parameters, the quadratic polynomials cannot satisfy both
boundary conditions
. It is obvious that with only three free
parameters, the quadratic polynomials cannot satisfy both
boundary conditions
 and
and
 .
.
 with four parameters
with four parameters
 , and
, and  can satisfy the following four
equations required for
can satisfy the following four
equations required for  ):
):
 and
and
 , we first consdier
, we first consdier
 , which, as a
linear function, can be linearly fit by the two end points
, which, as a
linear function, can be linearly fit by the two end points
 and
and
 :
:

 twice we get
twice we get

 and
and
 , we have:
, we have:









 , we take derivative of
, we take derivative of 


 and
and  , becomes:
, becomes:

![$\displaystyle \frac{h_i}{3}M_i+\frac{y_i-y_{i-1}}{h_i}+\frac{h_i}{6}M_{i-1}
=\frac{h_i}{6}(2M_i+M_{i-1})+f[x_{i-1},x_i]$](img372.svg)

![$\displaystyle -\frac{h_i}{3}M_{i-1}+\frac{y_i-y_{i-1}}{h_i}
-\frac{h_i}{6}M_i
=-\frac{h_i}{6}(2M_{i-1}-M_i)+f[x_{i-1},x_i]$](img374.svg)
 by
by  in the second equation, we also get
in the second equation, we also get

 , we equate the above to the
first equation to get:
, we equate the above to the
first equation to get:

 and
rearranging, we get:
and
rearranging, we get:
![$\displaystyle \frac{h_i}{h_{i+1}+h_i}M_{i-1}+2M_i+\frac{h_{i+1}}{h_{i+1}+h_i}M_...
...y_{i+1}-y_i}{h_{i+1}}
-\frac{y_i-y_{i-1}}{h_i}\right)=6\,f[x_{i-1},x_i,x_{i+1}]$](img381.svg)
![$\displaystyle \frac{1}{x_{i+1}-x_{i-1}}\left(\frac{y_{i+1}-y_i}{x_{i+1}-x_i}
-\...
...ght)
=\frac{f[x_i,x_{i+1}]-f[x_{i-1},x_i]}{x_i-x_{i-1}}
=f[x_{i-1},x_i,x_{i+1}]$](img382.svg)
![$\displaystyle \mu_iM_{i-1}+2M_i+\lambda_iM_{i+1}=6\,f[x_{i-1},x_i,x_{i+1}],\;\;\;\;\;\;\;
(i=1,\cdots,n-1)$](img383.svg)

 equations but
equations but  .
To obtain these unknowns, we need to get two additional equations
based on certain assumed boundary conditions.
.
To obtain these unknowns, we need to get two additional equations
based on certain assumed boundary conditions.
 and
and  are known. Specially
are known. Specially
 is called
clamped boundary condition. At the front end, we set
is called
clamped boundary condition. At the front end, we set
![$\displaystyle C'_1(x_0)=-\frac{h_1}{3}M_0+\frac{y_1-y_0}{h_1}-\frac{h_1}{6}M_1
=-\frac{h_1}{3}M_0-\frac{h_1}{6}M_1+f[x_0,x_1]=f'(x_0)$](img390.svg)
 we get
we get
![$\displaystyle 2M_0+M_1=\frac{6}{x_1-x_0}[f[x_0,x_1]-f'(x_0)]=6\,f[x_0,x_0,x_1]$](img392.svg)
![$\displaystyle C'_n(x_{n})=\frac{h_n}{3}M_n+\frac{y_n-y_{n-1}}{h_n}
+\frac{h_n}{6}M_{n-1}
=\frac{h_n}{3}M_n+\frac{h_n}{6}M_{n-1}+f[x_{n-1},x_n]=f'(x_n)$](img393.svg)
 we get
we get
![$\displaystyle 2M_n+M_{n-1}=\frac{6}{x_n-x_{n-1}}[f'(x_n)-f[x_{n-1},x_n]]
=6\,f[x_{n-1},x_n,x_n]$](img395.svg)
![$\displaystyle \left[\begin{array}{ccccc}
2 & 1 & & & \\
\mu_1 & 2 & \lambda_1 ...
...,x_2]\\ \vdots\\ f[x_{n-2},x_{n-1},x_n]\\ f[x_{n-1},x_n,x_n]
\end{array}\right]$](img396.svg)
 and
and  are known. Specially
are known. Specially
 is called
natural boundary condition.
Now we can simply get
is called
natural boundary condition.
Now we can simply get
 and
and
 and solve
the following system for the
and solve
the following system for the ![$\displaystyle \left[\begin{array}{ccccc}
1 & 0 & & & \\
\mu_1 & 2 & \lambda_1 ...
...f[x_0,x_1,x_2]\\ \vdots\\ 6f[x_{n-2},x_{n-1},x_n]\\ f''(x_n)
\end{array}\right]$](img402.svg)

![$\displaystyle \left[\begin{array}{llll}2 & 1 & 0 & 0\\ 0.5 & 2 & 0.5 & 0\\
0 &...
...ht]
=\left[\begin{array}{r}4.185\\ 3.858\\ -8.076\\ 9.827\end{array}\right]
\\ $](img406.svg)