Next: Cubic Spline Interpolation Up: Interpolation and Extrapolation Previous: The Newton Polynomial Interpolation
If the first  derivatives of the function
derivatives of the function  are known as well
as the function value at each of the
are known as well
as the function value at each of the  node points
node points
 ,
i.e., we have available a set of
,
i.e., we have available a set of
 values
values
 , then the function can be interpolated
by a polynomial of degree
, then the function can be interpolated
by a polynomial of degree
 :
:
 |
(46) |
coefficients
 could be obtained by solving a linear equation
system of the same number of equations:
could be obtained by solving a linear equation
system of the same number of equations:
 |
(47) |
 .
.
In practice, the Hermite interpolation can be used in such a
case. First, we assume  , and represent the Hermite polynomial
as a linear combination of
, and represent the Hermite polynomial
as a linear combination of
 basis polynomials
basis polynomials
 (
(
 ) of degree
) of degree  :
:
 |
(48) |
 to satisfy
to satisfy
 and
and
 (
(
 ), the basis polynomials must satisfy:
), the basis polynomials must satisfy:
 |
(49) |
 satisfies
satisfies
 , we let the basis polynomials of degree
take the following forms:
, we let the basis polynomials of degree
take the following forms:
 |
(50) |
 and
and  for
for
 and
and
 to satisfy the following when
to satisfy the following when
 :
:
 |
(51) |
 and and |
(52) |
 |
(53) |
 |
 |
 |
|
|
 |
||
|
![$\displaystyle \sum_{i=0}^n\left[f(x_i)+(x-x_i)(f'(x_i)-2f(x_i)l'_i(x))\right]\;l_i^2(x)$](img247.svg) |
(54) |
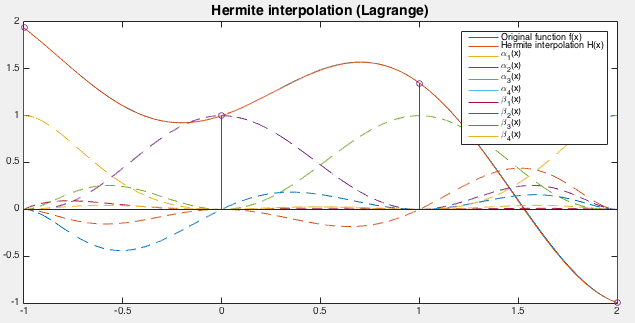
Example
The Hermite interpolation is carried out to the same function
 used in previous examples, with the result
shown in the figure below, together with the basis polynomials
used in previous examples, with the result
shown in the figure below, together with the basis polynomials
 . As the first order derivative
. As the first order derivative  is
available as well as the function value
is
available as well as the function value  at each node point
at each node point  ,
the interpolation matches the given function very well
(almost identical on the plots), with an error
,
the interpolation matches the given function very well
(almost identical on the plots), with an error
 , which
is much reduced from
, which
is much reduced from
 of all methods previously discussed
based only on .
of all methods previously discussed
based only on .
The Matlab code that implements the Hermite interpolation method is listed below.
function [H a b]=HIL(u,x,y,dy) % Hermite interpolation (Lagrange)
% u: discrete data points;
% vector x: [x_1,...,x_n]
% vector y: [y_1,...,y_n]
% vector dy: [y'_1,...,y'_n]
n=length(x); % number of interpolating points
k=length(u); % number of discrete data points
li=ones(n,k); % Lagrange basis polynomials
a=zeros(n,k); % basis polynomials alpha(x)
b=zeros(n,k); % basis polynomials beta(x)
H=zeros(1,k); % Hermie interpolation polynomial H(x)
for i=1:n
dl=0; % derivative of Lagrange basis
for j=1:n
if j~=i
dl=dl+1/(x(i)-x(j));
li(i,:)=li(i,:).*(u-x(j))/(x(i)-x(j));
end
end
l2=li(i,:).^2;
b(i,:)=(u-x(i)).*l2; % basis polynomial alpha(x)
a(i,:)=(1-2*(u-x(i))*dl).*l2; % basis polynomial beta(x)
H=H+a(i,:)*y(i)+b(i,:)*dy(i); % Hermite polynomial H(x)
end
end
We next consider the case when  . Now we have
. Now we have  known
values
known
values
 at each of the node
points
. Such a dataset can be represented by
another variable
at each of the node
points
. Such a dataset can be represented by
another variable  that takes the values of
each repeated times, as shown in the table:
that takes the values of
each repeated times, as shown in the table:
 |
(55) |
This function  with
sample points can then be
interpolated by the Newton polynomial method. For example, if
with
sample points can then be
interpolated by the Newton polynomial method. For example, if
 , then the Newton's polynomial of degree
, then the Newton's polynomial of degree
 can be found to be:
can be found to be:
 |
|
![$\displaystyle f(z_0)+\sum_{i=1}^8 f[x_0,\cdots,x_i]\prod_{j=0}^{i-1}(x-x_j)$](img262.svg) |
|
|
+f[z_0,z_1,z_2](x-z_0)(x-z_1)$](img263.svg) |
||
(x-z_1)(x-z_2)$](img264.svg) |
|||
(x-z_1)(x-z_2)(x-z_3)$](img265.svg) |
|||
(x-z_1)(x-z_2)(x-z_3)(x-z_4)$](img266.svg) |
|||
(x-z_1)(x-z_2)(x-z_3)(x-z_4)(x-z_5)$](img267.svg) |
|||
(x-z_1)(x-z_2)(x-z_3)(x-z_4)(x-z_5)(x-z_6)$](img268.svg) |
|||
(x-z_1)(x-z_2)(x-z_3)(x-z_4)(x-z_5)(x-z_6)(x-z_7)$](img269.svg) |
|||
|
+f[x_0,x_0,x_0](x-x_0)^2+f[x_0,x_0,x_0,x_1](x-x_0)^3$](img270.svg) |
||
^3(x-x_1)+f[x_0,x_0,x_0,x_1,x_1,x_1](x-x_0)^3(x-x_1)^2$](img271.svg) |
|||
^3(x-x_1)^3$](img272.svg) |
|||
^3(x-x_1)^3(x-x_2)$](img273.svg) |
|||
^3(x-x_1)^3(x-x_2)^2$](img274.svg) |
(56) |
 for all
for all
 and
and
 . Similar to the Newton polynomial method discussed previously,
the divided difference coefficients can be obtained recursively, with the only
difference that there exist repeated copies at each point , where
the divided difference can be found by
. Similar to the Newton polynomial method discussed previously,
the divided difference coefficients can be obtained recursively, with the only
difference that there exist repeated copies at each point , where
the divided difference can be found by
![$\displaystyle f[x_0,\cdots,x_0]=\lim\limits_{x_i\rightarrow x_0,\;(i=0,\cdots,n)} f[x_0,\cdots,x_n]
=\frac{f^{(n)}(x_0)}{n!}$](img278.svg) |
(57) |
 above can
be recursively generated in tabular form below, eventually appearing as the
diagonal elements of the table.
above can
be recursively generated in tabular form below, eventually appearing as the
diagonal elements of the table.
![\begin{displaymath}\begin{array}{c\vert c\vert\vert c\vert c\vert c\vert c\vert ...
...f[x_1,x_2,x_2,x_2] &f[x_1,x_1,x_2,x_2,x_2]\\ \hline
\end{array}\end{displaymath}](img280.svg) |
(58) |
![\begin{displaymath}\begin{array}{c\vert c\vert c\vert c}\hline
5th & 6th & 7th &...
..._2]&f[x_0,x_0,x_0,x_1,x_1,x_1,x_2,x_2,x_2]\\ \hline
\end{array}\end{displaymath}](img281.svg) |
(59) |
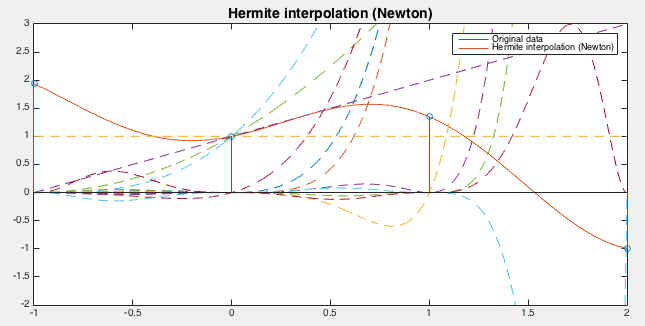
Example:
The Hermite interpolation based Newton's polynomials is again carried
out to the same function
used before.
Now we assume both the first and second order derivatives
and  are available as well as at the
are available as well as at the  points. The resulting Hermite interpolation is plotted together
with in the figure below. We see that they are almost identical,
with an error
points. The resulting Hermite interpolation is plotted together
with in the figure below. We see that they are almost identical,
with an error
 .
.
The Matlab code that implements this algorithm is listed below.
function [v]=HIN(u,x,dy) % Hermite interpolation (Newton)
% u: discrete data points;
% vector x: [x_1,...,x_n]
% matrix dy contains m derivatives at each of the n points
[n m]=size(dy);
k=length(u); % number of discrete data points
v=zeros(1,k); % interpolation results
dd=DividedDifference2(x,dy); % get the divided difference array
w=ones(1,k);
for i=1:n
p=u-x(i);
for j=1:m
l=(i-1)*m+j; % index of the coefficient
v=v+dd(l,l).*w; % which is on the diagnal of array dd
w=w.*p;
end
end
end
function dd=DividedDifference2(x,dy) % generate array of divided differences
[n m]=size(dy); % n data points, m derivatives (0 to m-1)
dd=zeros(n*m); % matrix of divided differences
z=zeros(1,n*m);
k=1;
for i=1:n % n data points
for j=1:m % m derivatives (0 to m-1) at each point
k=(i-1)*m+j; % row index
z(k)=x(i);
dd(k,1)=dy(i,1); % 0th divided difference in first column
fprintf('%6.3f\t%6.3f\t',z(k),dd(k,1));
for l=2:k % column index for the remaining columns
%fprintf('(%f %f)\n',dd(k,l-1),dd(k-1,l-1));
if dd(k,l-1)==dd(k-1,l-1) % left and top-left neighbors are repeated
dd(k,l)=dy(i,l)/factorial(l-1);
fprintf('k=%d, l=%d\n',k,l);
pause
else
dd(k,l)=(dd(k,l-1)-dd(k-1,l-1))/(z(k)-z(k-l+1));
end
fprintf('%6.3f\t',dd(k,l));
end
fprintf('\n');
end
end
end
The array of divided differences generated by the function DividedDifference2
is given below, the elements along the diagonal are the coefficients in the Hermite
polynomials.
 |
(60) |