The Lagrange interpolation relies on the  interpolation
points
interpolation
points
 , all of which need
to be available to calculate each of the basis polynomials
, all of which need
to be available to calculate each of the basis polynomials
 . If additional points are to be used when they become
available, all basis polynomials need to be recalculated.
. If additional points are to be used when they become
available, all basis polynomials need to be recalculated.
In comparison, in the Newton interpolation, when more data points
are to be used, additional basis polynomials and the corresponding
coefficients can be calculated, while all existing basis polynomials
and their coefficients remain unchanged. Due to the additional terms,
the degree of interpolation polynomial is higher and the approximation
error may be reduced (e.g., when interpolating higher order
polynomials).
Specifically, the basis polynomials of the Newton interpolation are
calculated as below:
 |
(25) |
and the Newton interpolating polynomial is constructed:
When when the next data point
 is available, not used in any of
the basis polynomials, but it is used for calculating the last
coefficient
is available, not used in any of
the basis polynomials, but it is used for calculating the last
coefficient  , as shown below. For this nth degree polynomial
, as shown below. For this nth degree polynomial
 to pass all points
to pass all points
 , it
needs to satisfy the following equations:
, it
needs to satisfy the following equations:
 |
(27) |
which can also be expressed in matrix form:
![$\displaystyle \left[\begin{array}{cccccc}1&&&&&\\ 1&x_1-x_0&&&&\\
1&x_2-x_0&(x...
...]
=\left[\begin{array}{c}y_0\\ y_1\\ y_2\\ y_3\\ \vdots\\ y_n\end{array}\right]$](img144.svg) |
(28) |
The coefficients
 can be obtained by
solving these equations in the triangular equation system
progressively from top down:
can be obtained by
solving these equations in the triangular equation system
progressively from top down:
In general, we have
![$\displaystyle c_k=f[x_0,\cdots,x_k]
=\sum_{j=0}^k\frac{f(x_j)}{\prod_{i=0,\;i\ne j}^k (x_j-x_i)},
\;\;\;\;\;(k=0,\cdots,n)$](img159.svg) |
(30) |
which is the expanded form of the kth
divided differences
![$f[x_0,\cdots,x_k]$](img160.svg) of the first
of the first  points. Now the Newton polynomial
interpolation can be written as
points. Now the Newton polynomial
interpolation can be written as
![$\displaystyle N_n(x)=\sum_{i=0}^nc_i n_i(x)=\sum_{i=0}^n f[x_0,\cdots,x_i] n_i(x)
=f[x_0]+\sum_{i=1}^n\;f[x_0,\cdots,x_i]\left(\prod_{j=0}^{i-1}(x-x_j)\right)$](img162.svg) |
(31) |
Due to the uniqueness of the polynomial interpolation, this Newton
interpolation polynomial is the same as that of the Lagrange and the
power function interpolations:
 . They are the
same nth degree polynomial but expressed in terms of different basis
polynomials weighted by different coefficients.
. They are the
same nth degree polynomial but expressed in terms of different basis
polynomials weighted by different coefficients.
We can now consider some important facts all related to the Newton
polynomial interpolation.
- When an additional node point
 is avialable
and to be used, all previous basis polynomials and their corresponding
coefficients remain unchanged, we only need to obtain a new basis
polynomial of degree :
is avialable
and to be used, all previous basis polynomials and their corresponding
coefficients remain unchanged, we only need to obtain a new basis
polynomial of degree :
 |
(32) |
together with its coefficient, the (n+1)th divided difference
![$c_{n+1}=f[x_0,\cdots,x_n,x_{n+1}]$](img166.svg) . The new interpolation polynomial
of degree can then be obtained by including an extra term in
the summation above:
. The new interpolation polynomial
of degree can then be obtained by including an extra term in
the summation above:
![$\displaystyle N_{n+1}(x)=\sum_{i=0}^{n+1}c_i n_i(x)
=\sum_{i=0}^n c_i n_i(x)+c_{n+1}n_{n+1}(x)
=N_n(x)+f[x_0,\cdots,x_n,x_{n+1}] l(x)$](img167.svg) |
(33) |
As
 passes through the new point
,
we have
passes through the new point
,
we have
![$\displaystyle f(x_{n+1})=N_{n+1}(x_{n+1})=N_n(x_{n+1})+f[x_0,\cdots,x_n,x_{n+1}] l(x)$](img169.svg) |
(34) |
But  is just an arbitrary point, we can replace it by
is just an arbitrary point, we can replace it by  ,
and get
,
and get
![$\displaystyle f(x)=N_n(x)+f[x_0,\cdots,x_n,x] l(x)$](img171.svg) |
(35) |
Comparing this with the error function:
 |
(36) |
we see that the error term can also be written as
![$\displaystyle R_n(x)=f[x_0,\cdots,x_n,\,x] l(x)$](img173.svg) |
(37) |
and we also get:
![$\displaystyle f[x_0,\cdots,x_n,x]=\frac{f^{(n+1)}(\xi)}{(n+1)!}$](img174.svg) |
(38) |
- Specially, if all of the node points approach to a single
position,
 , at the limit they
become the same point
, at the limit they
become the same point  repeated
repeated  times, then we have
times, then we have
![$\displaystyle f[x_0,\cdots,x_n]=\frac{f^{(n)}(\xi)}{n!}
\;\;\;\stackrel{x_i\rightarrow x_0}{\Longrightarrow}\;\;\;
f[x_0,\cdots,x_0]=\frac{f^{(n)}(x_0)}{n!}$](img177.svg) |
(39) |
and the Newton interpolation based on points becomes
![$\displaystyle N_n(x)=f[x_0]+\sum_{i=1}^n \left(f[x_0,\cdots,x_i]\prod_{j=0}^{i-...
...rrow x_0}{\Longrightarrow}
f(x_0)+\sum_{i=1}^n \frac{f^{(i)}(x_0)}{i!}(x-x_0)^i$](img178.svg) |
(40) |
which is the first terms of the Taylor series expansion of
the function with the truncation error:
 |
(41) |
where  is some point between and . We see that
the Taylor series is actually a special case of the Newton
interpolation at the limit when all node points approach
to the same position .
is some point between and . We see that
the Taylor series is actually a special case of the Newton
interpolation at the limit when all node points approach
to the same position .
- If all points
 are
equally spaced, i.e.,
are
equally spaced, i.e.,
 |
(42) |
then Newton's divided difference interpolation can take a simpler
form. For any point
 , we let
, we let
 so that it
can be represented as
so that it
can be represented as  , and
, and
 ,
now the Newton polynomial can be written as
,
now the Newton polynomial can be written as
where
 |
(44) |
Example:
Approximate function
 by a polynomial
of degree
by a polynomial
of degree  , based on the following
, based on the following  points:
points:
Based on
![$f[x_i]=f(x_i),\;(i=0,\cdots,n)$](img192.svg) , we can find all other
divided differences recursively in tabular form as shown below.
In general,
, we can find all other
divided differences recursively in tabular form as shown below.
In general,
![$f[x_i,\cdots,x_j]$](img193.svg) can be found based on its left neighbor
can be found based on its left neighbor
![$f[x_{i+1},\cdots,x_j]$](img194.svg) and top-left neighbor
and top-left neighbor
![$f[x_i,\cdots,x_{j-1}]$](img195.svg) :
:
The coefficients are the four divided differences along the
diagonal:
![$c_0=f[x_0]=f(x_0)=y_0=1.937$](img198.svg) ,
,
![$c_1=f[x_0,x_1]=-0.937$](img199.svg) ,
,
![$c_2=f[x_0,x_1,x_2]=0.643$](img200.svg) , and
, and
![$c_3=f[x_0,x_1,x_2,x_3]=-0.663$](img201.svg) .
Alternatively, they can also be represented in the expanded form:
.
Alternatively, they can also be represented in the expanded form:
![$\displaystyle c_i=f[x_0,\cdots,x_i]=\sum_{j=0}^n\frac{f(x_j)}{\prod_{i=0,\,i\ne j}^n(x_j-x_i)}$](img202.svg) |
(45) |
Now the Newton interpolating polynomial can be obtained as:
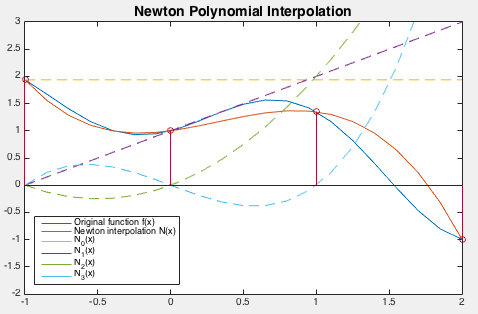
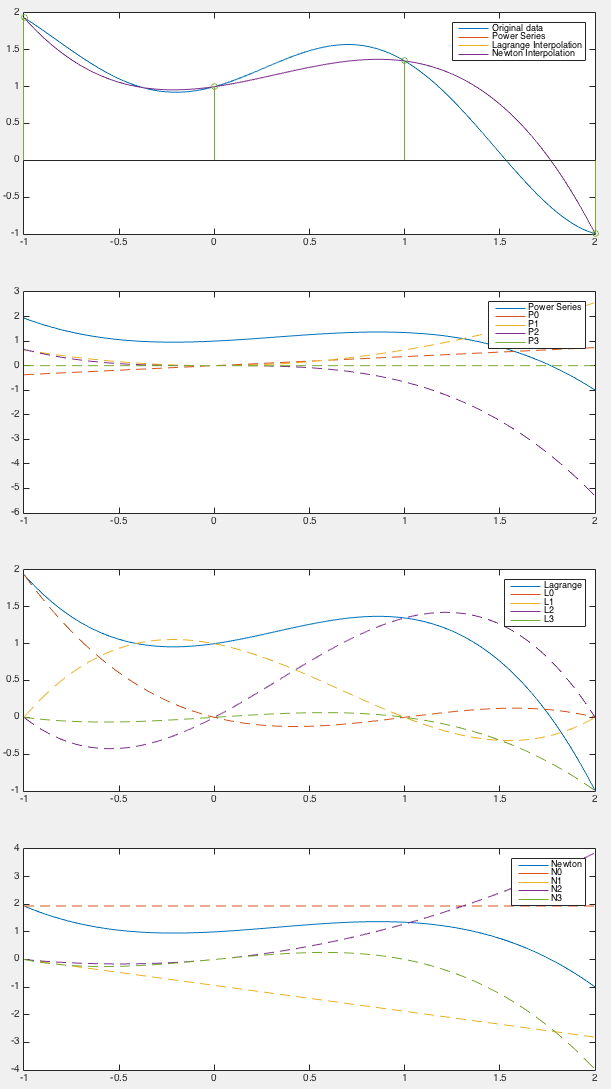
The polynomial interpolations generated by the power series
method, the Lagrange and Newton interpolations are exactly the
same,
 , confirming the uniqueness of the
polynomial interpolation, as plotted in the top panel below,
together with the original function
, confirming the uniqueness of the
polynomial interpolation, as plotted in the top panel below,
together with the original function  . We see that they
indeed pass through all node points at
. We see that they
indeed pass through all node points at  ,
,  ,
,
 and
and  . Also, the weighted basis polynomials of
each of the three methods are plotted in the subsequent panels,
including power series
. Also, the weighted basis polynomials of
each of the three methods are plotted in the subsequent panels,
including power series
 in the second panel,
the Lagrange basis polynomials
in the second panel,
the Lagrange basis polynomials
 in the
third panel, and the Newton basis polynomials
in the
third panel, and the Newton basis polynomials
 in the bottom panel. In each case, the weighted sum of
these basis polynomials is the interpolating polynomial that
approximates the given function.
in the bottom panel. In each case, the weighted sum of
these basis polynomials is the interpolating polynomial that
approximates the given function.
The Matlab code that implements the Newton polynomial method is listed
below. The coefficients
![$c_i=f[x_0,\cdots,x_n]\;(i=0,\cdots,n)$](img215.svg) can be
generated in either the expanded form or the tabular form by recursion.
can be
generated in either the expanded form or the tabular form by recursion.
function [v N]=NI(u,x,y) % Newton's Interpolation
% vectors x and y contain n+1 points and the corresponding function values
% vector u contains all discrete samples of the continuous argument of f(x)
n=length(x); % number of interpolating points
k=length(u); % number of discrete sample points
v=zeros(1,k); % Newton interpolation
N=ones(n,k); % all n Newton's polynomials (each of m elements)
N(1,:)=y(1); % first Newton's polynomial
v=v+N(1,:);
for i=2:n % generate remaining Newton's polynomials
for j=1:i-1
N(i,:)=N(i,:).*(u-x(j));
end
c=DividedDifference(x,y,i) % get the ith coefficient c_i
v=v+c*N(i,:); % weighted sum of all Newton's polynomials
end
end
function dd=DividedDifference(x,y,i) % generate f[x_0,...,x_i] in expanded form
dd=0;
for k=1:i % loop for summation
de=1;
for l=1:i % loop for product
if k~=l
de=de*(x(k)-x(l));
end
end
dd=dd+y(k)/de; % ith coefficient c_i
end
end
function dd=DividedDifferenceMatrix(x,y) % generate divided difference matrix
n=length(x); % the coefficients are along diagonal
dd=zeros(n); % matrix of divided differences
dd(:,1)=y;
for i=1:n
fprintf('%6.3f\t',dd(i,1))
for j=2:i
dd(i,j)=(dd(i,j-1)-dd(i-1,j-1))/(x(i)-x(i-j+1));
fprintf('%6.3f\t',dd(i,j));
end
fprintf('\n');
end
end





![$\displaystyle y_0=f(x_0)=f[x_0]$](img147.svg)

![$\displaystyle \frac{y_1-y_0}{x_1-x_0}=f[x_0,x_1]$](img149.svg)

![$\displaystyle \frac{\frac{y_2-y_0}{x_2-x_0}-\frac{y_1-y_0}{x_1-x_0}}{x_2-x_1}
=f[x_0,x_1,x_2]$](img151.svg)


![$\displaystyle \frac{\frac{\frac{y_3-y_0}{x_3-x_0}-\frac{y_1-y_0}{x_1-x_0}}{x_3-...
..._2-y_0}{x_2-x_0}-\frac{y_1-y_0}{x_1-x_0}}{x_2-x_1}}{x_3-x_2}
=f[x_0,\cdots,x_3]$](img154.svg)





![$\displaystyle N(x_0+ch)=f[x_0]+\sum_{i=1}^nf[x_0,\cdots,x_i]\prod_{j=0}^{i-1}(x-x_j)$](img187.svg)
![$\displaystyle f[x_0]+f[x_0,x_1]ch+f[x_0,x_1,x_2]c(c-1)h^2
+\cdots+f[x_0,\cdots,x_n]c(c-1)\cdots(c-n+1)h^n$](img188.svg)
![$\displaystyle \sum_{i=0}^nf[x_0,\cdots,x_i]c(c-1)(c-2)\cdots(c-i+1)h^i
=\sum_{i=0}^nf[x_0,\cdots,x_i]\left(\begin{array}{c}c\\ i\end{array}\right)i!\;h^i$](img189.svg)

![$\displaystyle f[x_i,\cdots,x_j]=\frac{f[x_{i+1},\cdots,x_j]-f[x_i,\cdots,x_{j-1}]}{x_j-x_i}
\\ $](img196.svg)
![\begin{displaymath}\begin{array}{c\vert\vert l\vert l\vert l\vert l}\hline
x_i &...
... f[x_1,x_3]=-1.346 & f[x_0,x_3]=-0.663 \\ \hline
\end{array}\\ \end{displaymath}](img197.svg)



