As we see in the previous example, due to the change of the system
parameters, the problem may become difficult to solve, in the sense
that significantly reduced step size and thereby much increased
computing time will be needed for the numerical solution to remain
bounded. Such problems are said to be stiff, which is hard
to be strictly defined mathematically. One way to measure the
stiffness of a given problem is the stiffness ratio defined as
 , where
, where
 and
and
 are
respectively the eigenvalues of the coefficient matrix
are
respectively the eigenvalues of the coefficient matrix  with most negative and least negative real part, assuming all
eigenvalues have negative real parts. In the example above, the
stiffness ratios corresponding to the four sets of parameters are
1, 10, 100, and 1000, i.e., the problem becomes progressively more
stiff measured by this particular paramter.
with most negative and least negative real part, assuming all
eigenvalues have negative real parts. In the example above, the
stiffness ratios corresponding to the four sets of parameters are
1, 10, 100, and 1000, i.e., the problem becomes progressively more
stiff measured by this particular paramter.
The stiffness of a differential equation is not strictly defined
mathematically. Some descriptive and commonly accepted criteria for
the stiffness are listed below. They are not necessarily independent
of each other, instead, they may be considered as different aspects
of the same phenomenon.
- Small step size is required for the stability rather than the
accuracy of the method used.
- Implicit methods need to be used as explicit methods require
extremely small step size and are therefore extremely slow.
- The solution contains components that decay much more quickly
than others, i.e., the components in the solution decay at very
different time scales.
- All eigenvalues of the coefficient matrix of a linear constant
coefficient DE
 have negative
real part, and the stiffness ratio is large.
have negative
real part, and the stiffness ratio is large.
- All eigenvalues of the Jacobian of the
 function of a
DE
function of a
DE
 differ greatly in magnitude.
differ greatly in magnitude.
From the last example we also see that even if the given DE is stiff,
requiring small step size and long computing time for the numerical
methods used to remain stable, there are some methods, such as the
backward Euler's method, that are stable, as the numerical solution
they produce will not grow without bound, although the order of their
error is not necessarily high, and the step size is not necessarily
small. We therefore see that the accuracy in terms of the order of
the truncation error and the stability are two different characteristics
of a specific method. A stable method of low order of error such as the
backward Euler method may be more stable than a method with higher order
of error such as RK4. We need to have a way to measure the stability of
a specific method. To do so, we consider a simple test equation:
 |
(318) |
where the initial value  is real and
is real and  is assumed to be
complex in general. The closed form solution of this equation is
is assumed to be
complex in general. The closed form solution of this equation is
 , which converges if
, which converges if
 :
:
 |
(319) |
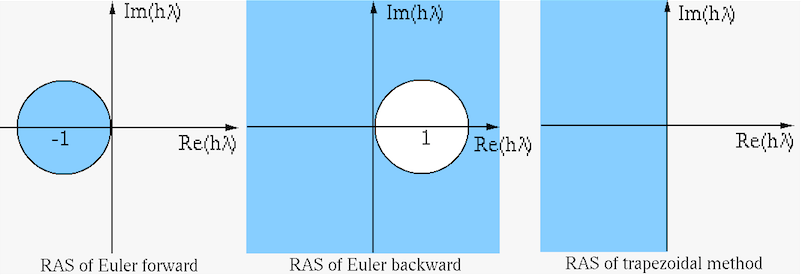
The stability of a specific method can now be measured by applying it to
this test equation, in terms of its region of absolute stability
(RAS), defined as the region on the complex plane, any value  in which corresponds to a bounded solution of the differential equation.
If, in particular, the entire left-hand plan
in which corresponds to a bounded solution of the differential equation.
If, in particular, the entire left-hand plan
 is inside
the RAS of a method, then it is absolute stable or A-stable.
An A-stable method is always stable, i.e., the numerical solution it
generates is bounded, for any step size, so long as
, i.e.,
the true solution of the DE is bounded.
is inside
the RAS of a method, then it is absolute stable or A-stable.
An A-stable method is always stable, i.e., the numerical solution it
generates is bounded, for any step size, so long as
, i.e.,
the true solution of the DE is bounded.
Note that the RAS depends on the product (instead of either
 or alone), because a smaller step size is needed for
a larger
or alone), because a smaller step size is needed for
a larger
 of a more rapidly decaying function
, but a greater step size can be used for a
small
of a slowly decaying
of a more rapidly decaying function
, but a greater step size can be used for a
small
of a slowly decaying  .
.
The RAS of a general method, such as the multi-step Adams-Moulton method
(Eq. (225)), can be obtained by applying it to the test
equation
 :
:
This iteration can be viewed as a homogeneous difference equation:
 |
(321) |
If we assume  , this equation becomes:
, this equation becomes:
where
 |
(323) |
is the characteristic polynomial with  roots
roots
 . The
solution of the test equation Eq. (320) is the linear combination
of terms of
. The
solution of the test equation Eq. (320) is the linear combination
of terms of  :
:
 |
(324) |
where the coefficients
 can be determined based on
given initial conditions
can be determined based on
given initial conditions
 . For this solution to
be bounded we must have
. For this solution to
be bounded we must have  for all
for all
 .
.
- Forward Euler's method (Eq. (206),
 ):
):
The characteristic equation is
 |
(326) |
We must have
 for the solution to be bounded.
Alternatively, we can reach the same result based on the direction
observation that the following ratio must be smaller than 1 for the
solution to converge:
for the solution to be bounded.
Alternatively, we can reach the same result based on the direction
observation that the following ratio must be smaller than 1 for the
solution to converge:
 |
(327) |
This RAS is the unite circle centered at  , the method is
not A-stable. On the real axis, we have
, the method is
not A-stable. On the real axis, we have
 , i.e.,
, i.e.,
 or
or
 . If
. If  , i.e., the
solution
exponentially decays to 0, the
numerical solution will converge only if
, i.e., the
solution
exponentially decays to 0, the
numerical solution will converge only if
 .
.
- Backward Euler's method (Eq. (208),
 ):
):
 |
(328) |
 |
(329) |
For the solution to be bounded, we must have
 ,
i.e.,
,
i.e.,
 .
Alternatively, we can reach the same result based on the direction
observation that the following ratio must be smaller than 1 for the
solution to converge:
.
Alternatively, we can reach the same result based on the direction
observation that the following ratio must be smaller than 1 for the
solution to converge:
 |
(330) |
This RAS is the area outside the unite circle centered at  .
If , i.e., the solution
exponentially
decays to 0, the numerical solution will always converge, as no
matter how large the step size may be,
.
If , i.e., the solution
exponentially
decays to 0, the numerical solution will always converge, as no
matter how large the step size may be,
 is always
smaller than 1. The method is A-stable.
is always
smaller than 1. The method is A-stable.
- The trapezoidal method (Eq. (210)),
 ):
):
 |
(331) |
 |
(332) |
For the solution to be bounded, we must have
 .
Alternatively, we can reach the same result based on the direction
observation that the following ratio must be smaller than 1 for the
solution to converge:
.
Alternatively, we can reach the same result based on the direction
observation that the following ratio must be smaller than 1 for the
solution to converge:
 |
(333) |
The inequality holds if
 , i.e., the RAS is the entire
left-hand plan, the method is A-stable.
, i.e., the RAS is the entire
left-hand plan, the method is A-stable.
- Second order Adams-Bashforth method (Eq. (222),
 ):
):
 |
(334) |
 |
(335) |
The two roots are:
 |
(336) |
For the solution to be bounded, we must have  . In particular,
on the real axis, we have
. In particular,
on the real axis, we have
 |
(337) |
i.e.,
 |
(338) |
Solving these inequalities, we get
 .
.
Note that for methods of order  , the condition of stability can
no longer be found by solving
, the condition of stability can
no longer be found by solving
 .
.
- Runge-Kutta methods:
As shown in the example in Section ![[*]](crossref.png) , the iterations of RK
methods for the test equation
, the iterations of RK
methods for the test equation
 are
are
For the iteration to converge, we need to have
 , i.e.,
the magnitudes of the corresponding polynomial of inside the
brackets must be smaller than 1. All points of that satisfy
the inequality above form the RAS on the complex plane, as shown
here:
, i.e.,
the magnitudes of the corresponding polynomial of inside the
brackets must be smaller than 1. All points of that satisfy
the inequality above form the RAS on the complex plane, as shown
here:
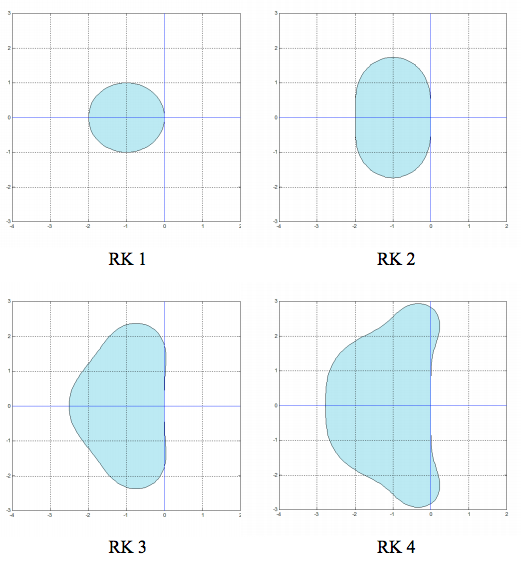
We see that although the RK methods have high order of errors (e.g.,
RK4 with  ), they are not A-stable, while the implicit backward
Euler and trapezoidal methods are both A-stable, even though they have
lower order error, as shown in the example of the the previous section.
), they are not A-stable, while the implicit backward
Euler and trapezoidal methods are both A-stable, even though they have
lower order error, as shown in the example of the the previous section.
The discussion above for single-variable linear constant coefficient DEs
can be generalized to a multi-variable linear constant coefficient DE
systems
 with a general solution:
with a general solution:
 |
(343) |
which in turn can be further generalized to nonlinear DE systems which can
be approximately linearized by dropping all higher order terms in its
Taylor expansion except the linear term represented by its Jacobian matrix
 . Then the discussion above in terms of the constant coefficient
matrix in a linear system can be generalized to a non-linear
system in terms of .
. Then the discussion above in terms of the constant coefficient
matrix in a linear system can be generalized to a non-linear
system in terms of .





![$\displaystyle cz^n [ (1-h\lambda b_{n+m})z^m-(1+h\lambda b_{n+m-1})z^{m-1}+h\lambda\sum_{i=0}^{m-2}b_iz^i ]$](img967.svg)







![$\displaystyle y_{n+1}=[1+h\lambda+(h\lambda)^2/2]y_n$](img1016.svg)

![$\displaystyle y_{n+1}=[1+h\lambda+(h\lambda)^2/2+(h\lambda)^3/6]y_n$](img1018.svg)

![$\displaystyle y_{n+1}=[1+h\lambda+(h\lambda)^2/2+(h\lambda)^3/6+(h\lambda)^4/24]y_n$](img1020.svg)