Next: Issues of Local/Global Minimum Up: Unconstrained Optimization Previous: Quasi-Newton Methods
The gradient descent method can be used to solve the minimization problem
when the Hessian matrix of the objective function is not available. However,
this method may be inefficient if it gets into a zigzag search pattern and
repeat the same search directions many times. This problem can be avoided
in the conjugate gradient (CG) method.
If the objective function is quadratic, the CG method converges to the
solution in  iterations without repeating any of the directions previously
traversed. If the objective function is not quadratic, the CG method can
still significantly improve the performance in comparison to the gradient
descent method.
iterations without repeating any of the directions previously
traversed. If the objective function is not quadratic, the CG method can
still significantly improve the performance in comparison to the gradient
descent method.
Again consider the approximation of the function
 to be
minimized by the first three terms of its Taylor series:
to be
minimized by the first three terms of its Taylor series:
 |
(128) |
has a
minimum. If function
is quadratic, the approximation
above becomes exact and the function can be written as
 |
(129) |
 is the symmetric Hessian matrix, and its
gradient and Hessian can be written as the following respectively:
is the symmetric Hessian matrix, and its
gradient and Hessian can be written as the following respectively:
 |
(130) |
 |
(131) |
 , we get the
solution
, we get the
solution
 , at which the function is minimized
to
, at which the function is minimized
to
 |
(132) |
 that minimizes
, its gradient is
that minimizes
, its gradient is
We also see that the minimization of the quadratic function
is equivalent to solving a linear equation
 with
a symmetric positive definite coefficient matrix
with
a symmetric positive definite coefficient matrix  . The CG method
considered here can therefore be used for solving both problems.
. The CG method
considered here can therefore be used for solving both problems.
Conjugate basis vectors
We first review the concept of
conjugate vectors, which is
of essential importance in the CG method. Two vectors  and
and
 are mutually conjugate (or A-orthogonal or A-conjugate)
to each other with respect to a symmetric matrix
are mutually conjugate (or A-orthogonal or A-conjugate)
to each other with respect to a symmetric matrix
 , if
they satisfy:
, if
they satisfy:
 |
(134) |
 , the two conjugate vectors become orthogonal
to each other, i.e.,
, the two conjugate vectors become orthogonal
to each other, i.e.,
 .
.
Similar to a set of orthogonal vectors that can be used as the basis
spanning an N-D space, a set of mutually conjugate vectors
 satisfying
satisfying
 (
( ) can also be used as a basis to span the N-D space. Any vector in
the space can be expressed as a linear combination of these basis vectors.
) can also be used as a basis to span the N-D space. Any vector in
the space can be expressed as a linear combination of these basis vectors.
Also we note that any set of independent vectors can be converted by the
Gram-Schmidt process
to a set of basis vectors that are either orthogonal or A-orthogonal.
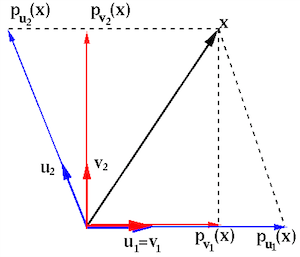
Example:
Given two independent basis vectors of the 2-D space, and a positive-definite matrix:
![$\displaystyle {\bf v}_1=\left[\begin{array}{r}1\\ 0\end{array}\right],\;\;\;\;\...
...y}\right],\;\;\;\;\;
{\bf A}=\left[\begin{array}{rr}3&1\\ 1&2\end{array}\right]$](img507.svg) |
![$\displaystyle {\bf u}_1={\bf v}_1=\left[\begin{array}{r}1\\ 0\end{array}\right]...
...1^T{\bf A}{\bf u}_1}{\bf u}_1
=\left[\begin{array}{c}-1/3\\ 1\end{array}\right]$](img508.svg) |
![${\bf x}=[2,\;3]^T$](img509.svg) onto
onto  and
and  are:
are:
![$\displaystyle {\bf p}_{{\bf v}_1}({\bf x})=\frac{{\bf v}_1^T{\bf x}}{{\bf v}_1^...
...array}{c}0\\ 1\end{array}\right]
=\left[\begin{array}{c}0\\ 3\end{array}\right]$](img512.svg) |
 onto
onto  and
and  are:
are:
![$\displaystyle {\bf p}_{{\bf u}_1}({\bf x})=\frac{{\bf u}_1^T{\bf A}{\bf x}}
{{\...
...y}{c}-1/3\\ 1\end{array}\right]
=\left[\begin{array}{c}-1\\ 3\end{array}\right]$](img515.svg) |
can be represented in either of the two bases:
![$\displaystyle {\bf x}=\left[\begin{array}{c}2\\ 3\end{array}\right]$](img516.svg) |
 |
![$\displaystyle 2\left[\begin{array}{c}1\\ 0\end{array}\right]
+3\left[\begin{arr...
...{\bf v}_1+3{\bf v}_2
={\bf p}_{{\bf v}_1}({\bf x})+{\bf p}_{{\bf v}_2}({\bf x})$](img517.svg) |
|
|
![$\displaystyle 3\left[\begin{array}{c}1\\ 0\end{array}\right]
+3\left[\begin{arr...
...{\bf u}_1+3{\bf u}_2
={\bf p}_{{\bf u}_1}({\bf x})+{\bf p}_{{\bf u}_2}({\bf x})$](img518.svg) |
Search along a conjugate basis
Similar to the gradient descent method, which iteratively improves
the estimated solution by following a sequence of orthogonal
search directions
 with
with
 satisfying
satisfying
 ,
the CG method also follows a sequence of search directions
A-orthogonal to each other, i.e.,
,
the CG method also follows a sequence of search directions
A-orthogonal to each other, i.e.,
 :
:
 .
Then subtracting from both sides, we get the iteration
in terms of the errors:
Due to
.
Then subtracting from both sides, we get the iteration
in terms of the errors:
Due to
 in Eq. (133), we can find the
gradient at the nth step
in Eq. (133), we can find the
gradient at the nth step  as
As the gradient at the solution is zero
as
As the gradient at the solution is zero
 ,
we can consider the gradient
,
we can consider the gradient  at as the
residual of the nth iteration, and
at as the
residual of the nth iteration, and
 an error measurement representing how close is to the
true solution .
an error measurement representing how close is to the
true solution .
The optimal step size given in Eq. (60) can now be
written as
 and
and  are A-orthogonal,
are A-orthogonal,
 .
Substituting this into Eq. (136) we get
.
Substituting this into Eq. (136) we get
 |
(139) |
 associated with the initial guess
associated with the initial guess  as a linear combination
of the A-orthogonal search vectors
as basis vectors that span the N-D vector space:
where
as a linear combination
of the A-orthogonal search vectors
as basis vectors that span the N-D vector space:
where
 is the A-projection of
is the A-projection of  onto the ith basis vector :
onto the ith basis vector :
 |
(141) |
 happens to be the negative optimal step
size in Eq. (138):
happens to be the negative optimal step
size in Eq. (138):
 |
(142) |
 in Eq. (136) can be written as
in Eq. (136) can be written as
 |
(143) |
is reduced by one, i.e., the nth component
 of along the direction
of
of along the direction
of  is completely eliminated. After such iterations,
the error is reduced from to
is completely eliminated. After such iterations,
the error is reduced from to
 , and the
true solution is obtained
, and the
true solution is obtained
 .
.
Pre-multiplying
 on both sides of the
equation above, we get
on both sides of the
equation above, we get
 |
(144) |
 iterations the remaining error
is A-orthogonal to all previous directions
iterations the remaining error
is A-orthogonal to all previous directions
 .
.
Due to Eq. (137), the equation above can also be written as
i.e., the gradient is orthogonal to all previous
search directions.
is orthogonal to all previous
search directions.
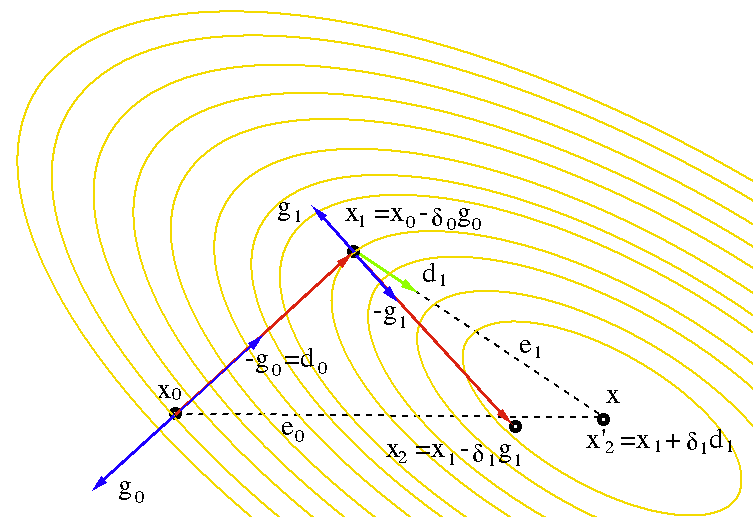
In the figure below, the conjugate gradient method is compared with
the gradient descent method for the case of  . We see that the
first search direction is the same
. We see that the
first search direction is the same
 for both methods.
However, the next search direction
for both methods.
However, the next search direction  is A-orthogonal to
is A-orthogonal to
 , same as the next error
, same as the next error  , different from
the search direction
, different from
the search direction
 in gradient descent method. The
conjugate gradient method finds the solution in
steps, while the gradient descent method has to go through many
more steps all orthogonal to each other before it finds the solution.
in gradient descent method. The
conjugate gradient method finds the solution in
steps, while the gradient descent method has to go through many
more steps all orthogonal to each other before it finds the solution.
 .
.
Find the A-orthogonal basis
The A-orthogonal search directions
can be constructed based on any set of independent vectors
 by the
Gram-Schmidt process:
by the
Gram-Schmidt process:
 and
and
 is the A-projection of
is the A-projection of  onto each
of the previous direction
onto each
of the previous direction  .
.
We will gain some significant computational advantage if we choose
to use
 . Now the Gram-Schmidt process above
becomes:
. Now the Gram-Schmidt process above
becomes:
can be written
as a linear combination of all previous search directions
:
 |
(149) |
 on both sides, we get
on both sides, we get
 |
(150) |
 in Eq. (145).
We see that
is also orthogonal to all previous gradients
in Eq. (145).
We see that
is also orthogonal to all previous gradients
 .
.
Pre-multiplying
 on both sides of Eq. (147),
we get
on both sides of Eq. (147),
we get
 |
(151) |
 for all
for all  (Eq. (145)). Substituting
(Eq. (145)). Substituting
 into Eq. (138), we get
Next we consider
into Eq. (138), we get
Next we consider
 |
(153) |
 with
with  on both sides we get
on both sides we get
 |
(154) |
 (
( ). Solving for
). Solving for
 we get
we get
 |
(155) |
 |
(156) |
which is non-zero only when  , i.e., there is only one non-zero term
in the summation of the Gram-Schmidt formula for . This is the
reason why we choose
. We can now drop the second
subscript
, i.e., there is only one non-zero term
in the summation of the Gram-Schmidt formula for . This is the
reason why we choose
. We can now drop the second
subscript  in
in
 , and Eq. (146) becomes:
, and Eq. (146) becomes:
 (Eq. (152)) into the above expression for
(Eq. (152)) into the above expression for
 ,
we get
We note that matrix no longer appears in the expression.
,
we get
We note that matrix no longer appears in the expression.
The CG algorithm
Summarizing the above, we finally get the conjugate gradient algorithm in the following steps:
 and initialize the search direction (same as gradient
descent):
and initialize the search direction (same as gradient
descent):
 |
(159) |
is smaller
than a preset threshold. Otherwise, continue with the following:
 |
(160) |
 |
(161) |
 |
(162) |
 |
(163) |
 and go back to step 2.
and go back to step 2.
The algorithm above assumes the objective function
to be quadratic
with known . But when
is not quadratic, is no
longer available, we can still approximate
as a quadratic function
by the first three terms in its Taylor series in the neighborhood of its minimum.
Also, the we need to modify the algorithm so that it does not depend on .
Specifically, the optimal step size  calculated in step 3 above based
on can also be alternatively found by line minimization based on any
suitable algorithms for 1-D optimization.
calculated in step 3 above based
on can also be alternatively found by line minimization based on any
suitable algorithms for 1-D optimization.
The Matlab code for the conjugate gradient algorithm is listed below:
function xn=myCG(o,tol) % o is the objective function to minimize
syms d; % variable for 1-D symbolic function f(d)
x=symvar(o).'; % symbolic variables in objective function
O=matlabFunction(o); % the objective function
G=jacobian(o).'; % symbolic gradient of o(x)
G=matlabFunction(G); % the gradient function
xn=zeros(length(x),1); % initial guess of x
xc=num2cell(xn);
e=O(xc{:}); % initial error
gn=G(xc{:}); % gradient at xn
dn=-gn; % use negative gradient as search direction
n=0;
while e>tol
n=n+1;
f=subs(o,x,xn+d*dn); % convert n-D f(x) to 1-D f(d)
delta=Opt1d(f); % find delta that minimizes 1D function f(d)
xn=xn+delta*dn; % updata variable x
xc=num2cell(xn);
e=O(xc{:}); % new error
gn1=G(xc{:}); % new gradient
bt=-(gn1.'*gn1)/(gn.'*gn); % find beta
dn=-gn1-bt*dn; % new search direction
gn=gn1; % update gradient
fprintf('%d\t(%.4f, %.4f, %.4f)\t%e\n',n,xn(1),xn(2),xn(3),e)
end
end
Here is the function that uses Newton's method to find the optimal
step size  that minimizes the objective function as a 1-D
function of :
that minimizes the objective function as a 1-D
function of :
function x=Opt1d(f) % f is 1-D symbolic function to minimize
syms x;
tol=10^(-3);
d1=diff(f); % 1st order derivative
d2=diff(d1); % 2nd order derivative
f=matlabFunction(f);
d1=matlabFunction(d1);
d2=matlabFunction(d2);
x=0.0; % initial guess of delta
if d2(x)<=0 % second order derivative needs to be greater than 0
x=rand-0.5;
end
y=x+1;
while abs(x-y) > tol % minimization
y=x;
x=y-d1(y)/d2(y); % Newton iteration
end
end
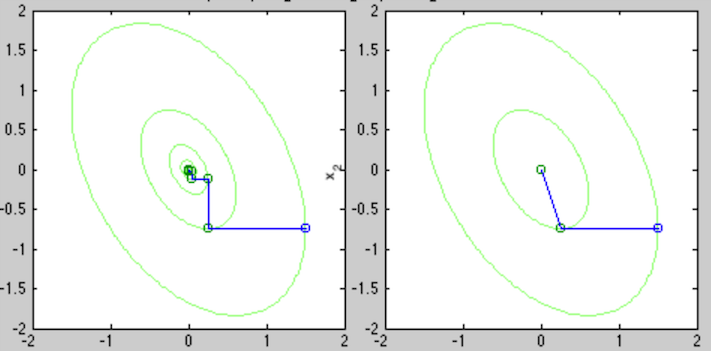
Example:
To compare the conjugate method and the gradient descent method, consider a very simple 2-D quadratic function
![$\displaystyle f(x,y)={\bf x}^T{\bf A}{\bf x}
=[x_1,\,x_2]\left[\begin{array}{cc}3&1\\ 1&2\end{array}\right]
\left[\begin{array}{c}x_1\\ x_2\end{array}\right]$](img600.svg) |
![${\bf x}_0=[1.5,\;-0.75]^T$](img601.svg) ,
the iteration gets into a zigzag pattern and the convergence is very slow,
as shown below:
,
the iteration gets into a zigzag pattern and the convergence is very slow,
as shown below:
![\begin{displaymath}\begin{array}{c\vert c\vert c}\hline
n & {\bf x}=[x_1,\,x_2] ...
...
13 & 0.000005, -0.000016 & 2.153408e-10 \\ \hline
\end{array}\end{displaymath}](img602.svg) |
steps from any initial guess to reach at the solution:
![\begin{displaymath}\begin{array}{c\vert c\vert c}\hline
n & {\bf x}=[x_1,\,x_2] ...
...\
2 & 0.000000, -0.000000 & 1.155558e-33 \\ \hline
\end{array}\end{displaymath}](img603.svg) |
For an  example of
example of
 with
with
![$\displaystyle {\bf A}=\left[\begin{array}{ccc}5 & 3 & 1\\ 3 & 4 & 2\\ 1 & 2 & 3
\end{array}\right]$](img605.svg) |
![${\bf x}_0=[1,\;2,\;3]^T$](img606.svg) , it takes the gradient
descent method 41 iterations to reach
, it takes the gradient
descent method 41 iterations to reach
![${\bf x}_{41}=[3.5486e-06,\;-7.4471e-06,\;4.6180e-06]^T$](img607.svg) corresponding
to
corresponding
to
 . From the same initial guess, it takes the
conjugate gradient method only iterations to converge to the
solution:
. From the same initial guess, it takes the
conjugate gradient method only iterations to converge to the
solution:
 |
For an  example, it takes over 4000 iterations for the gradient
descent method to converge with
example, it takes over 4000 iterations for the gradient
descent method to converge with
 , but exactly 9
iterations for the CG method to converge with
, but exactly 9
iterations for the CG method to converge with
 .
.
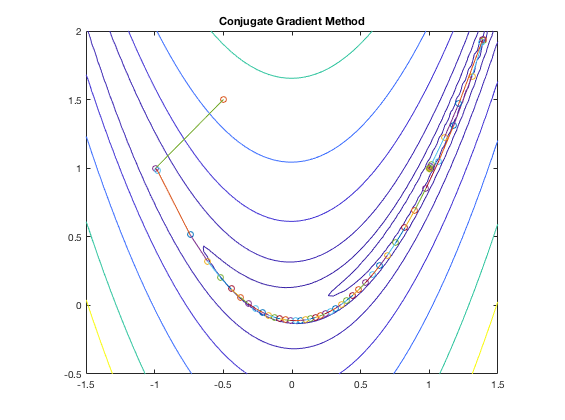
Example:
The figure below shows the search path of the conjugate gradient method applied to the minimization of the Rosenbrock function:
Example:
Solve the following non-linear equation system by the CG method:
 |
 .
.
This equation system can be represented in vector form as
 and the objective function is
and the objective function is
 .
The iteration of the CG method with an initial guess
.
The iteration of the CG method with an initial guess
 is
shown below:
is
shown below:
 |
In comparison, the gradient descent method would need to take over 200 iterations (with much reduced complexity though) to reach this level of error.
Conjugate gradient method used for solving linear equation systems:
As discussed before, if is the solution that minimizes the
quadratic function
 ,
with
being symmetric and positive definite, it also satisfies
,
with
being symmetric and positive definite, it also satisfies
 . In other words, the
optimization problem is equivalent to the problem of solving the linear system
. In other words, the
optimization problem is equivalent to the problem of solving the linear system
 , both can be solved by the conjugate gradient
method.
, both can be solved by the conjugate gradient
method.
Now consider solving the linear system
with
. Let
 be a set of
A-orthogonal vectors satisfying
be a set of
A-orthogonal vectors satisfying
 ,
which can be generated based on any independent vectors, such as the
standard basis vectors, by the Gram-Smidth method. The solution
of the equation
can be represented by these
vectors as
,
which can be generated based on any independent vectors, such as the
standard basis vectors, by the Gram-Smidth method. The solution
of the equation
can be represented by these
vectors as
 |
(164) |
![$\displaystyle {\bf b}={\bf A}{\bf x}={\bf A}\left[\sum_{i=1}^N c_i{\bf d}_i\right]
=\sum_{i=1}^N c_i{\bf A}{\bf d}_i$](img621.svg) |
(165) |
 on both sides we get
on both sides we get
 |
(166) |
 we get
we get
 |
(167) |
we get the solution
of the equation:
 |
(168) |
 , the ith term of the summation above
is simply the A-projection of onto the ith direction :
, the ith term of the summation above
is simply the A-projection of onto the ith direction :
 |
(169) |
One application of the conjugate gradient method is to solve the normal
equation to find the least-square solution of an over-constrained equation
system
, where the coefficient matrix is  by with rank
by with rank  . As discussed previously, the normal equation of this
system is
. As discussed previously, the normal equation of this
system is
 |
(170) |
 is an by symmetric, positive definite matrix.
This normal equation can be solved by the conjugate gradient method.
is an by symmetric, positive definite matrix.
This normal equation can be solved by the conjugate gradient method.














