Next: Convolutional Neural Networks (CNNs) Up: ch10 Previous: Competitive Learning Networks
The Self-organizing map (SOM)
is a two-layer
unsupervised neural network learning algorithm that maps any
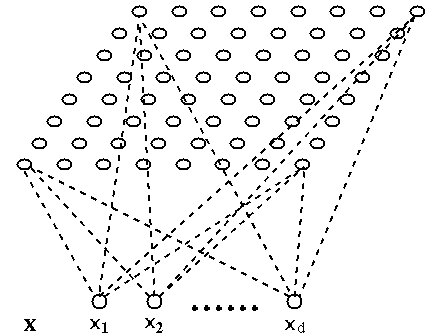
input pattern presented to its input layer, a vector
![${\bf x}=[x_1,\cdots,x_d]^T$](img44.svg) in a d-dimensional feature space, to
a set of output nodes that forms a low-dimensional space called
feature map, typically a 2-D grid (lattice), although 1-D
and 3-D spaces can also be used. A SOM can therefore be considered
as a dimensionality reduction method, by which the dataset in the
high-dimensional feature space can be visualized and the features
and structures of the dataset can be discovered.
in a d-dimensional feature space, to
a set of output nodes that forms a low-dimensional space called
feature map, typically a 2-D grid (lattice), although 1-D
and 3-D spaces can also be used. A SOM can therefore be considered
as a dimensionality reduction method, by which the dataset in the
high-dimensional feature space can be visualized and the features
and structures of the dataset can be discovered.
The learning rule of the SOM is similar to that of the competitive learning network considered previously in that all output nodes compete based on their activation levels upon the input pattern presented to input nodes of the network. However, different from the competitive learning network where only the winning node gets to modify its weight vector and learn to respond to a cluster of similar patterns individually and independently, here in SOM network all output nodes in the neighborhood of the winning node get to modify their weight vectors and thereby learn to respond collectively to a cluster of similar input patterns. As the result, all output nodes are locked into a continum feature map with smooth and gradual variation in responsive selectivity.
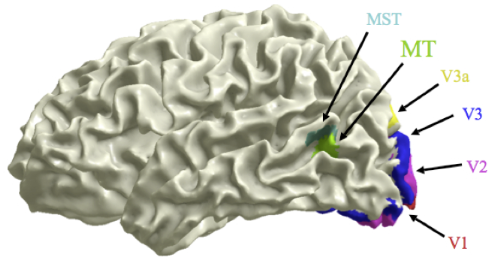
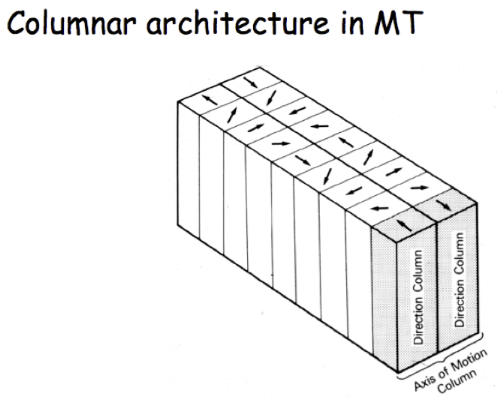
The SOM as a learning algorithm is motivated by the mapping process in the brain, by which signals from various sensory systems (e.g., visual and auditory) are projected (mapped) to different cortical areas and responded to by the neurons wherein in such a way that all neurons in a local cortical area selectively respond to similar stimuli, as shown in the following examples.
In a typical SOM network, the output nodes are organized in a 2-D feature map, and the competitive learning algorithm previouisly discussed is modified so that the learning takes place at not only the winning node in the output layer, but also a set of nodes in the neighborhood of the winner. The weight vectors of all such nodes are modified:
where is a weighting function based on the Euclidean distance
is a weighting function based on the Euclidean distance
 from the ith node in the neighborhood to the winner in the 2-D
feature map, such as a Gaussian function centered at the winner:
from the ith node in the neighborhood to the winner in the 2-D
feature map, such as a Gaussian function centered at the winner:
 |
(86) |
 is a hyperparameter that controls the width of the
Gaussian function. We see that all neurons in the neighborhood of
the winner learn from the current input pattern in such a way that
their weight vectors are modified to be closer to the input vector
in the d-dimensional feature space, but they do so to different
extents. Speically, for the winner itself with
is a hyperparameter that controls the width of the
Gaussian function. We see that all neurons in the neighborhood of
the winner learn from the current input pattern in such a way that
their weight vectors are modified to be closer to the input vector
in the d-dimensional feature space, but they do so to different
extents. Speically, for the winner itself with  and
and  ,
the learning rate for the winner is maximally
,
the learning rate for the winner is maximally  , while all
other nodes with
, while all
other nodes with  also modify their weights but with some
lower rates
also modify their weights but with some
lower rates  . Those closer to the winner with smaller
and thereby greater will learn more than those farther away.
. Those closer to the winner with smaller
and thereby greater will learn more than those farther away.
Here are the specific steps of the SOM learning algorithm:
 in the
high-dimensional feature space and calculate the activation
in the
high-dimensional feature space and calculate the activation
 for each of the output nodes.
for each of the output nodes.
 and
update the weights of all nodes in its neighborhood by
Eq. (85).
and
update the weights of all nodes in its neighborhood by
Eq. (85).
In the training process, both controlling the size of the
neighborhood and for the learning rate will be gradually reduced.
Shown below is the the Matlab code segment for the essential part of the SOM algorithm.
[d N]=size(X); % dataset of N sample vectors
W=rand(d,M,M); % initialization of weights
for i=1:M
for j=1:M
w=reshape(W(:,i,j),[d 1]);
W(i,j,:)=W(:,i,j)/norm(w); % normalize all weight vectors
end
end
eta=0.9; % initial learning rate
sgm=M; % width of Gaussian neighborhood
decay=0.999; % rate of decay
for it=1:nt % training iterations
n=randi([1 N]);
x=X(:,n); % pick randomly an input
amax=-inf;
for i=1:M % find the winner
for j=1:M
w=reshape(W(:,i,j),[d 1]);
a=x'*w; % activation as inner product
if a>amax
amax=a; wi=i; wj=j; % record winner so far
end
end
end
for i=1:M
for j=1:M
dist=(wi-i)^2+(wj-j)^2; % distance to winner
c=exp(-dist/sgm); % Gaussian weights
w=reshape(W(:,i,j),[d 1]); % get a weight vector
w=w+eta*c*(x-w); % modify weights
w=w/norm(w); % normalize weight vectors
W(:,i,j)=w; % save modified weight vector
end
end
eta=eta*decay; % reduce learning rate
sgm=sgm*decay; % reduce width of Gaussian
end
Example 1:
This example of “self-organizing map” is how the SOM algorithm
got its name. The output nodes are organized into a 2-D map and
they learn to respond to the positions of a set of random points
![${\bf x}=[x_1,\,x_2]^T$](img421.svg) in a 2-D feature space. The weights of the
output nodes are randomly initialized, and then modified during
the learning process when the data points are repeatedly presented
to the input of the network. When the SOM hase been trained, due
to the spatial correlation nature of the algorithm, the output
nodes close to each other in the 2-D feature map respond to a set
of adjacent data points in the 2-D space, thereby forming a
self-organized spatial map, a roughly regular grid.
in a 2-D feature space. The weights of the
output nodes are randomly initialized, and then modified during
the learning process when the data points are repeatedly presented
to the input of the network. When the SOM hase been trained, due
to the spatial correlation nature of the algorithm, the output
nodes close to each other in the 2-D feature map respond to a set
of adjacent data points in the 2-D space, thereby forming a
self-organized spatial map, a roughly regular grid.
The 2-D map of the output nodes is visualized as shown in the
figure below, where the spatial position of each node is
determined by the two components of its weight vector
![${\bf w}=[w_1,\,w_2]^T$](img422.svg) treated as its coordinates, and each node
is connected to its four neighbors in the 2-D grid to indicate the
spatial structure of the feature map.
treated as its coordinates, and each node
is connected to its four neighbors in the 2-D grid to indicate the
spatial structure of the feature map.
In this example, the competitive learning is based on the distance
between the weight vector  and the current input ,
instead of their inner product
and the current input ,
instead of their inner product
 . The node with
the shortest distance
. The node with
the shortest distance
 becomes the winner,
and its weight vector
becomes the winner,
and its weight vector  is pulled even closer to the input,
dragging along with it all its neighboring nodes.
is pulled even closer to the input,
dragging along with it all its neighboring nodes.
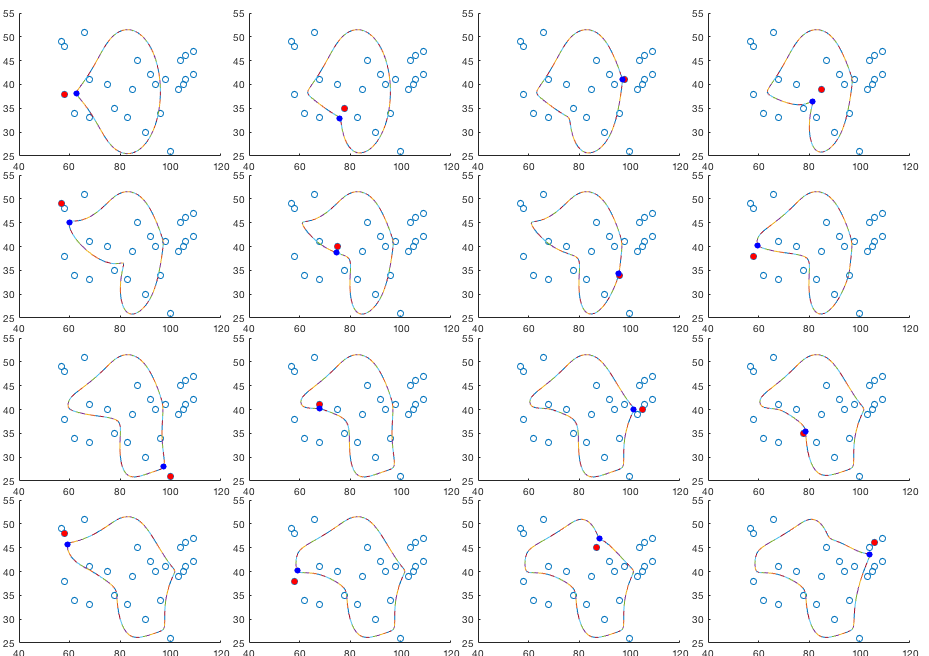
The figure below shows the iterative modification of the weights. In each of the 16 iterations, the output node (blue dot) is closest to the input vector (red dot) and it becomes the winner.
The figure below shows the subsequent iterations in every 50 iterations. The resulting configuration of the output nodes is roughly a regular 2-D grid, a self-organized map in the 2-D feature space.
Example 2:
In this example the output nodes of the SOM are arranged into a 1-D
loop and they respond to a set of cities in north America represented
by their coordinates (longitudes and latitudes), for the purpose of
finding a reasonably short path that goes through all of these cities
(the traveling salesman problem). These nodes are visualized in terms
of their weight vectors as points in a 2-D map. The weights are
initialized to form circle in the map the cities. During the learning
iteration when they learn to respond to the 2-D city coordinates as the
input, their weights are modified so that they are gradually pulled
toward the cities, thereby forming eventually a path through all the
cities. In this case, the inner product
 is used
to determine the winner of each iteration.
is used
to determine the winner of each iteration.
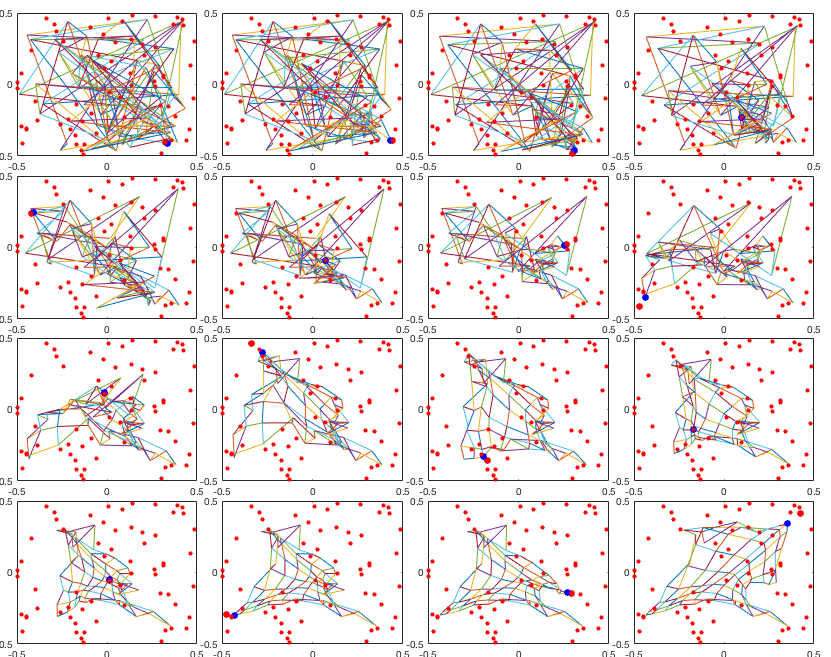
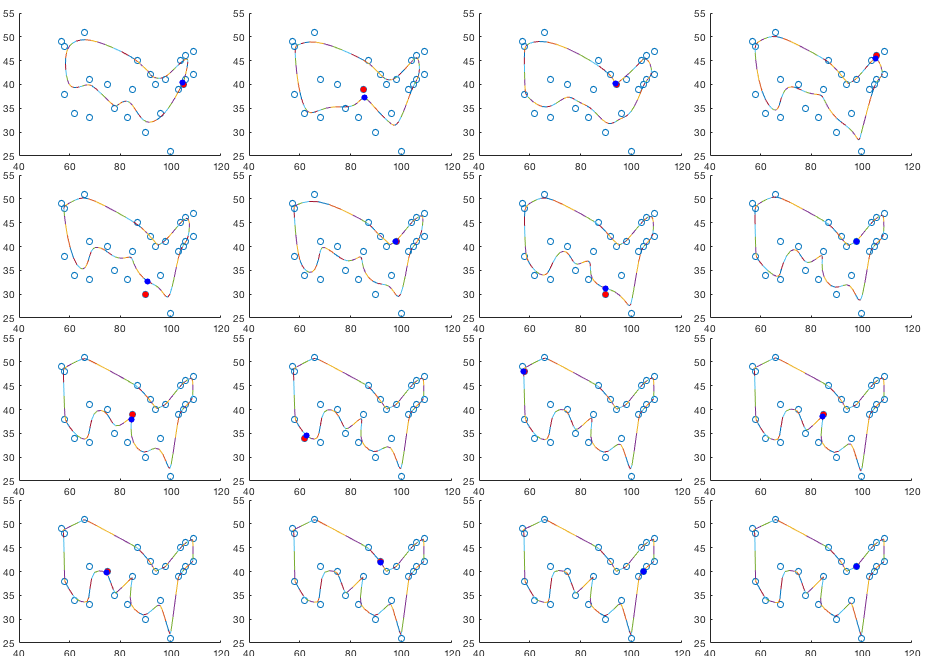
The figure below shows the results of the first 16 iterations:
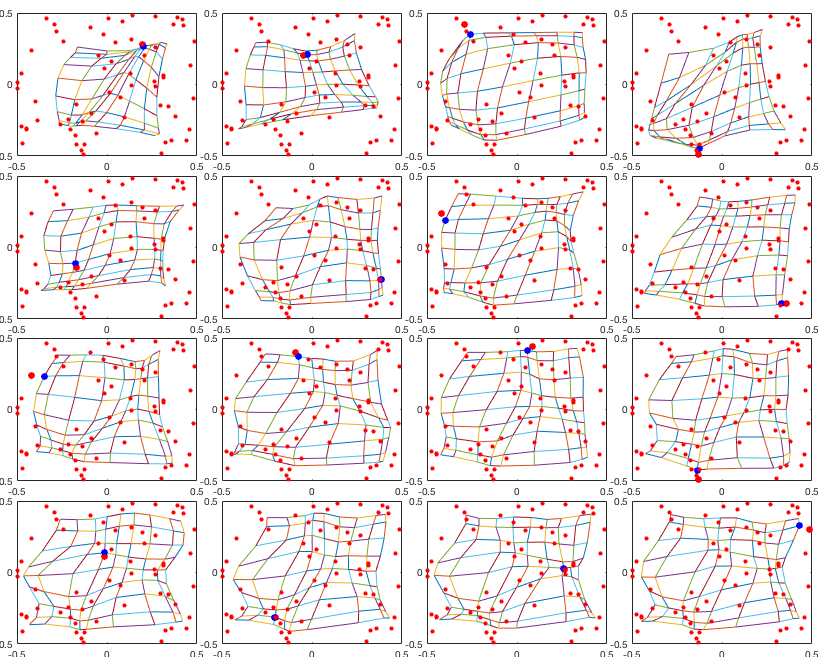
The figure below shows the subsequent iterations in every 50 iterations. The resulting configuration of the output nodes approaches the desired path that passes through all cities. Although this result does not garantee the path to be the shortest, it is reasonably close to such a solution required by the traveling salesman problem. The final result is unaffected by how the weights are initalized.
Example 3:
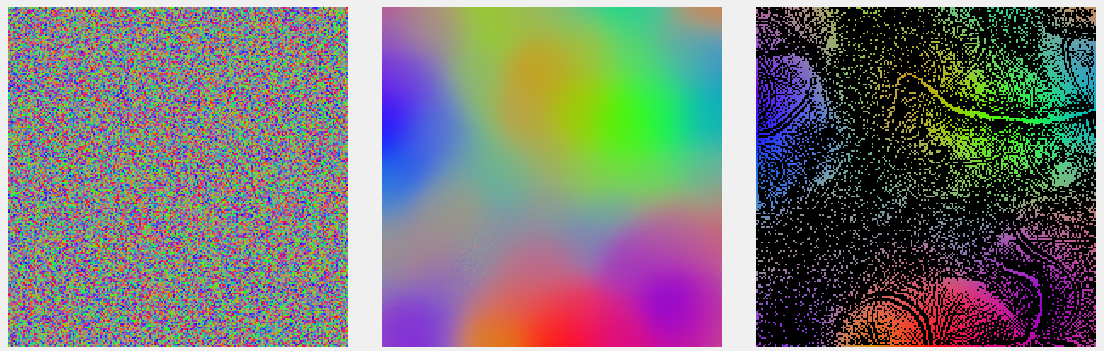
In this example, the output nodes in the 2-D feature map learn to respond to different colors treated as vectors in a 3-D space spanned by the three primary colors red, green and blue (RGB). When the SOM is trained, neighboring output nodes respond to similar colors. Here all input vectors are normalized (the hue of a color is fully determined by the ratios of the three primaries), and so are the weight vectors, which are always renormalized in each iteration.
To visualize the output nodes in the 2-D map, they are color coded based on the three components of their weight vectors treated as the three RGB colors, indicating their favored colors, the color they respond maximally, as shown in the figure below. The left panel is the nodes in the feature map with randomly initialized weights. The middle one shows these nodes after the SOM is fully trained. The right panel shows all the winners during the learning process, all encoded by the input colors they win. The black areas are composed of the output nodes that never win but learn along with their neighboring winners. Interestingly, the winners seem to form some structure in the 2-D space. More detailed discussion can be found here.
More examples of SOM can be found here.
