For a decision hyper-plane
![]() to separate the two
classes
to separate the two
classes
![]() and
and
![]() , it has to
satisfy
, it has to
satisfy
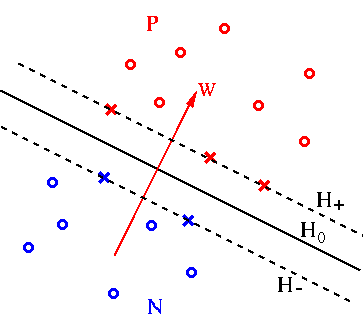
The optimal plane should be in the middle of the two classes, so that
the distance from the plane to the closest point on either side is the
same. We define two additional planes ![]() and
and ![]() that are parallel
to
that are parallel
to ![]() and go through the point closest to the plane on either side:
and go through the point closest to the plane on either side:
Moreover, the distances from the origin to the three parallel planes ![]() ,
,
![]() and
and ![]() are, respectively,
are, respectively,
![]() ,
,
![]() ,
and
,
and
![]() , and the distance between planes
, and the distance between planes ![]() and
and ![]() is
is
![]() . Our goal is to find the optimal decision hyperplane in
terms of
. Our goal is to find the optimal decision hyperplane in
terms of ![]() and
and ![]() with maximal distance between
with maximal distance between ![]() and
and ![]() ,
or, equivalantly, minimal
,
or, equivalantly, minimal
![]() . Now the
classification problem can be formulated as:
. Now the
classification problem can be formulated as:
 |
|||
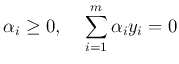
Since the objective function is quadratic, this constrained optimization
problem is called a quadratic program (QP) problem. (If the objective function
is linear instead, the problem is a linear program (LP) problem). This QP
problem can be solved by Lagrange multipliers method to minimize the following


 |
|||
 |
Solving this dual problem (an easier problem than the primal one), we get
![]() , from which
, from which ![]() of the optimal plane can be found.
of the optimal plane can be found.
Those points ![]() on either of the two planes
on either of the two planes ![]() and
and ![]() (for which
the equality
(for which
the equality
![]() holds) are called support vectors
and they correspond to positive Lagrange multipliers
holds) are called support vectors
and they correspond to positive Lagrange multipliers ![]() . The
training depends only on the support vectors, while all other samples away
from the planes
. The
training depends only on the support vectors, while all other samples away
from the planes ![]() and
and ![]() are not important.
are not important.
For a support vector ![]() (on the
(on the ![]() or
or ![]() plane), the constraining
condition is
plane), the constraining
condition is
 |
|||
 |
|||
 |