Next: Histogram Equalization Up: contrastTransform Previous: contrastTransform
Histogram:
In a typical 8-bit image, there are  discrete gray
scale levels from 0 to
discrete gray
scale levels from 0 to
 . The histogram of
an image represents the probability density function (pdf) of
the pixel values in the image over the entire gray scale range.
The ith entry of the histogram is
. The histogram of
an image represents the probability density function (pdf) of
the pixel values in the image over the entire gray scale range.
The ith entry of the histogram is
![$\displaystyle h[i]=\frac{n_i}{M\,N},\;\;\;\;\;\;\;(i=0,\cdots,L-1)$](img3.svg) |
(1) |
 is the number of pixels of gray level
is the number of pixels of gray level  in an image
of size
in an image
of size  .
. ![$h[l]$](img7.svg) is an estimate of the probability for
a randomly chosen pixel to take the gray level . Given
is an estimate of the probability for
a randomly chosen pixel to take the gray level . Given ![$h[i]$](img8.svg) ,
we can further get the cumulative distribution function:
,
we can further get the cumulative distribution function:
![$\displaystyle H[j]=\sum_{i=0}^j h[i],\;\;\;\;\;\;\;(j=0,\cdots,L-1)$](img9.svg) |
(2) |
![$\displaystyle H[L-1]=\sum_{i=0}^{L-1} h[i]=\frac{1}{MN}\sum_{i=0}^{L-1}n_i=1$](img10.svg) |
(3) |
 and
and  can
be displayed graphically as an image.
can
be displayed graphically as an image.
Gray level mapping:
The appearance (brightness, contrast, etc.) of an image represented
by its histogram can be modified by a user specified gray level mapping
function  where
where ![$x=x[m,n]$](img14.svg) is a pixel in the input image and
is a pixel in the input image and
![$y=y[m,n]$](img15.svg) is the corresponding pixel in the output image. This mapping
function can be specified in different ways, such as a piecewise linear
function, or based on the histogram of either or both of the input and
output images.
is the corresponding pixel in the output image. This mapping
function can be specified in different ways, such as a piecewise linear
function, or based on the histogram of either or both of the input and
output images.
Programming issues:
The above mapping functions can be carried out for each pixel in
the image. However, this is not an efficient way computationally.
A more effieicnt way to carry out this gray scale mapping is to u=
use a lookup table, which stores the pre-computed mapping for
each of the  gray levels. The gray level of a pixel in the input
image is used as the address to the table and the content of the
table entry is the gray level of the corresponding pixel of the
output image. Based on the lookup table, the mapping function only
needs to be carried out times, instead of (
gray levels. The gray level of a pixel in the input
image is used as the address to the table and the content of the
table entry is the gray level of the corresponding pixel of the
output image. Based on the lookup table, the mapping function only
needs to be carried out times, instead of ( )
times (size of the image).
)
times (size of the image).
Common mapping functions:
Here are some common gray scale mapping functions :
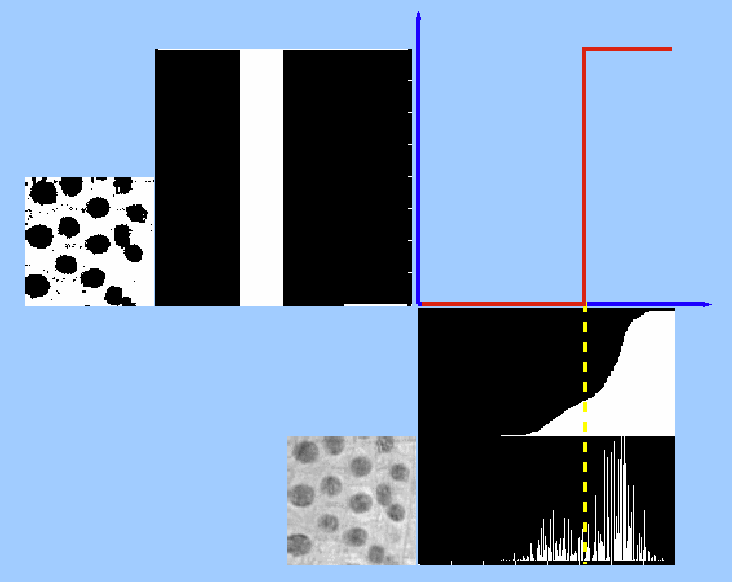
As a special case of piecewise linear mapping, thresholding is a simple way to do image segmentation, in particular, when the histogram of the image is bimodal with two peaks separated by a valley, typically corresponding to some object in the image and the background. A thresholding mapping maps all pixel values below a specified threshold to zero and all above to 255.
 |
(4) |
This mapping is shown below which generates the negative of the input image:
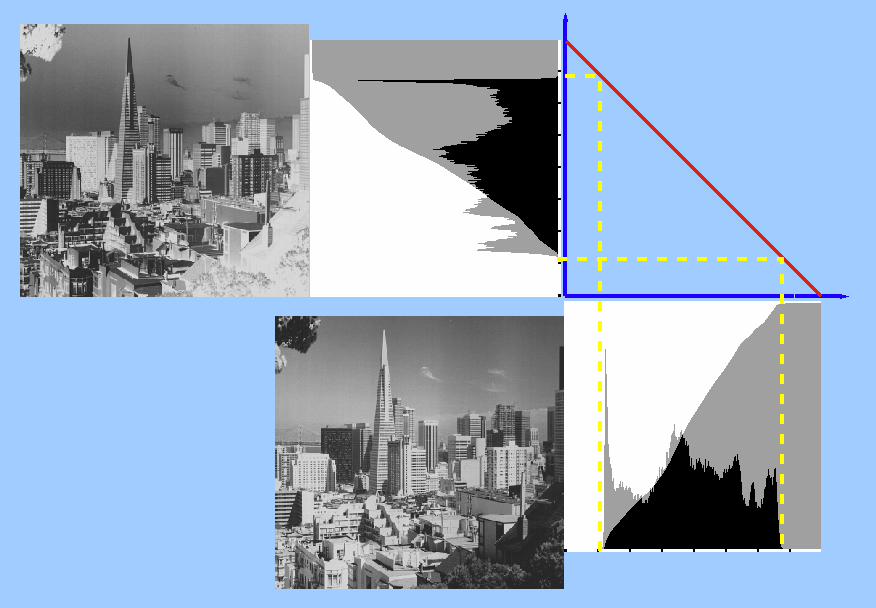
 |
(5) |
 ,
,
 for
for
 , and 0
for
, and 0
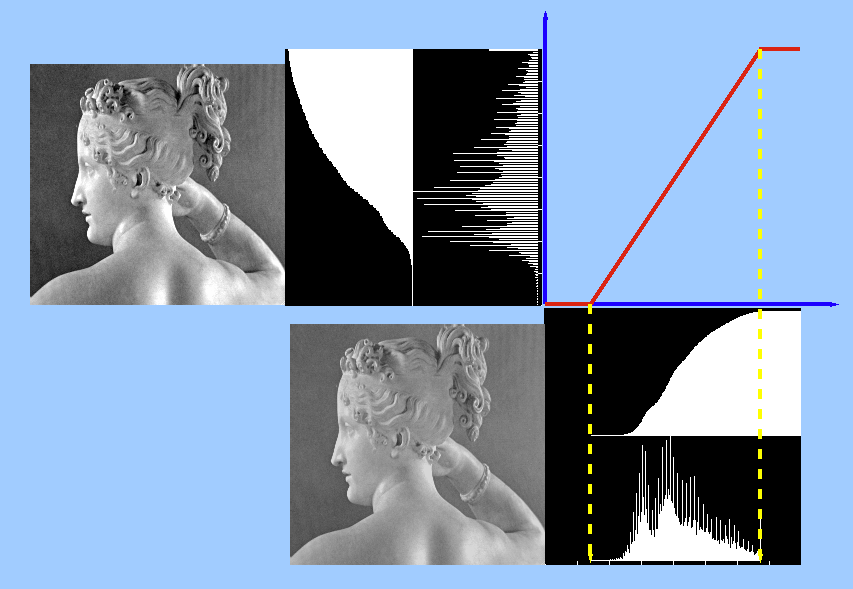
for  . The greater than 1 slope in the middle range
stretches the dynamic range of the image to use all gray
levels available in the display.
. The greater than 1 slope in the middle range
stretches the dynamic range of the image to use all gray
levels available in the display.
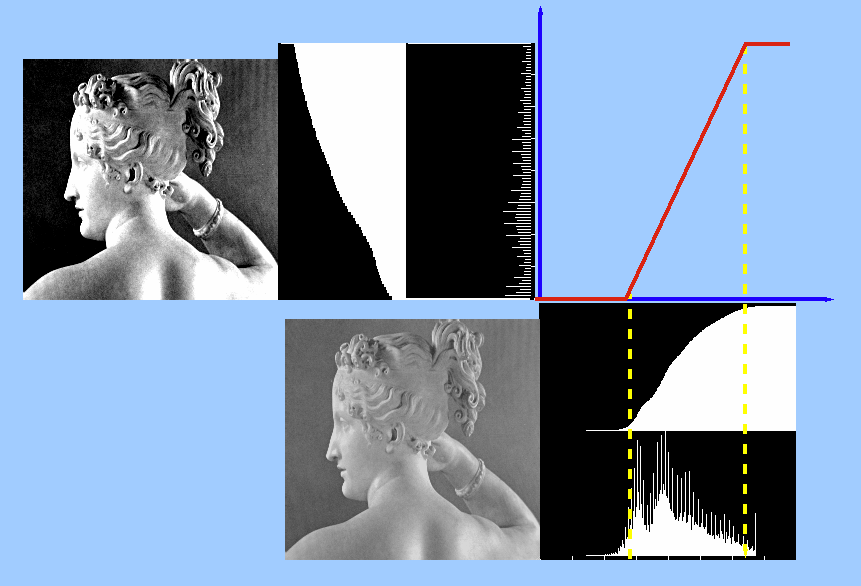
If in the image there are only a small number of pixels
close to minimum gray level 0 and the maximum gray level
 , and the gray level of most of the pixels are
concentrated in the middle range (gray) of the histogram,
the above linear stretch method based on the minimum and
maximum gray levels has very limited effect (as the slope
, and the gray level of most of the pixels are
concentrated in the middle range (gray) of the histogram,
the above linear stretch method based on the minimum and
maximum gray levels has very limited effect (as the slope
 is very close to 1).
is very close to 1).
In this case we can push a small percentage (e.g.,  ,
,
 ) of gray levels at either of the two ends of the
histogram toward 0 and
) of gray levels at either of the two ends of the
histogram toward 0 and  , as shown in the figure below.
(Note that the histograms of the input and output images in
the figure below are not to scale.)
, as shown in the figure below.
(Note that the histograms of the input and output images in
the figure below are not to scale.)
A mapping function can be specified by a set of  break-points
break-points
 , with neighboring points connected by
straight lines, such as shown here:
, with neighboring points connected by
straight lines, such as shown here:
For example, to increase the contrast of the image of Paolina, we can linearly stretch the gray scales of the image so that the darkest and brightest gray levels are mapped to 0 and 255, respectively.
Code Segments:
Here and ![$H[i]$](img31.svg) are the density and cumulative
distribution functions.
are the density and cumulative
distribution functions.
for (i=0; i<L; i++) {
h[i]=0; H[i]=0;
}
v=1.0/M/N;
for (i=0; i<M; i++)
for (j=0; j<N; j++)
h[x[i][j]]=h[x[i][j]]+v;
H[0]=h[0];
for (i=1; i<L; i++)
H[i]=H[i-1]+h[i];
Assume  and
and  are fractions such as
are fractions such as
 or
or  .
.
w=0; min=0;
while (w < cut_low)
w+=h[min++];
w=0; max=L-1;
while (w < cut_high)
w+=h[max--];
slope=(L-1)/(max-min);
for (i=0; i<L; i++)
if (i < min) lookup[i]=0;
else if (i >= max) lookup[i]=L-1;
else lookup[i]=slope*(i-min);
for (i=0; i<M; i++)
for (j=0; j<N; j++)
y[i][j]=lookup[x[i][j]];