Next: Eigenvalues and matrix diagonalization
Up: algebra
Previous: Normal, Hermitian, and unitary
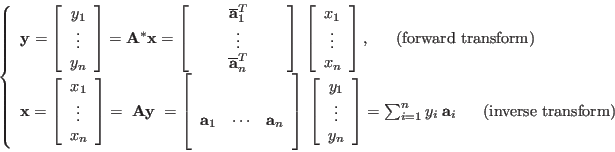
Given any unitary matrix  , we can define a unitary transform
of a vector
, we can define a unitary transform
of a vector
![${\bf x}=[x_1,\cdots,x_n]^T$](img199.png) :
:
When
 is real,
is real,
 is an
orthogonal matrix and the corresponding transform is an orthogonal transform.
is an
orthogonal matrix and the corresponding transform is an orthogonal transform.
The first equation above is the forward transform and can be written
in component form as:
The transform coefficient is an inner product
 ,
representing the projection of vector
,
representing the projection of vector  onto the ith column vector
onto the ith column vector
 of the transform matrix . The second equation is the
inverse transform and can also be written in component form as:
of the transform matrix . The second equation is the
inverse transform and can also be written in component form as:
By this transform, vector is represented as a linear combination
(weighted sum) of the  column vectors
column vectors
 of matrix . Geometrically, is a point in the n-dimensional space
spanned by these orthonormal basis vectors. Each coefficient (coordinate)
of matrix . Geometrically, is a point in the n-dimensional space
spanned by these orthonormal basis vectors. Each coefficient (coordinate)  is the projection of onto the corresponding basis vector .
is the projection of onto the corresponding basis vector .
As the n-dimensional space can be spanned by the column vectors of any n by n
unitary (orthogonal) matrix, a vector in the space can be represented by
any of such matrices, each defining a different transform.
Examples:
A unitary (orthogonal) transform
 can be interpreted
geometrically as the rotation of the vector
can be interpreted
geometrically as the rotation of the vector  about the origin, or equivalently,
the representation of the same vector in a rotated coordinate system. A unitary
(orthogonal) transform
about the origin, or equivalently,
the representation of the same vector in a rotated coordinate system. A unitary
(orthogonal) transform
 does not change the vector's
norm (length)
does not change the vector's
norm (length)
as
 . This is the Parseval's identity that
indicates that the norm or length of a vector is conserved under any unitary
transform. If
. This is the Parseval's identity that
indicates that the norm or length of a vector is conserved under any unitary
transform. If  is interpreted as a signal, then its length
is interpreted as a signal, then its length
 represents the total energy or information
contained in the signal, which is conserved during any unitary transform.
However, some other features of the signal may change, e.g., the signal may
be decorrelated and its total energy redistributed among its components after
the transform, which may be desirable in many applications.
represents the total energy or information
contained in the signal, which is conserved during any unitary transform.
However, some other features of the signal may change, e.g., the signal may
be decorrelated and its total energy redistributed among its components after
the transform, which may be desirable in many applications.
If is a random vector with mean vector  and covariance
matrix
and covariance
matrix  :
:
then its transform
has the following mean vector and
covariance matrix:
In general the unitary transform of any square matrix by a unitary
matrix  is
is
Next: Eigenvalues and matrix diagonalization
Up: algebra
Previous: Normal, Hermitian, and unitary
Ruye Wang
2015-04-27