Next: Optimality of KLT Up: Principal Component Analysis Previous: Covariance and Correlation
A data point in a d-dimensional space is represented by a vector
![${\bf x}=[x_1,\cdots,x_d]^T$](img2.svg) , of which the components are the
coordinates along the
, of which the components are the
coordinates along the  standard orthonomal basis vectors
standard orthonomal basis vectors
 that spann the space:
that spann the space:
 |
 |
![$\displaystyle \left[\begin{array}{c}x_1\\ x_2\\ \vdots\\ x_d\end{array}\right]
...
...begin{array}{c}0\\ \vdots\\ 0\\ 1\end{array}\right]
=\sum_{i=1}^d x_i {\bf e}_i$](img185.svg) |
|
|
![$\displaystyle \left[\begin{array}{ccc}&&\\ {\bf e}_1&\cdots&{\bf e}_d\\
&&\end...
...ght]
\left[\begin{array}{c}x_1\\ \vdots\\ x_d\end{array}\right]
={\bf I}{\bf x}$](img186.svg) |
(44) |
![${\bf I}=[{\bf e}_1,\cdots,{\bf e}_d]$](img187.svg) is the identity
matrix.
is the identity
matrix.
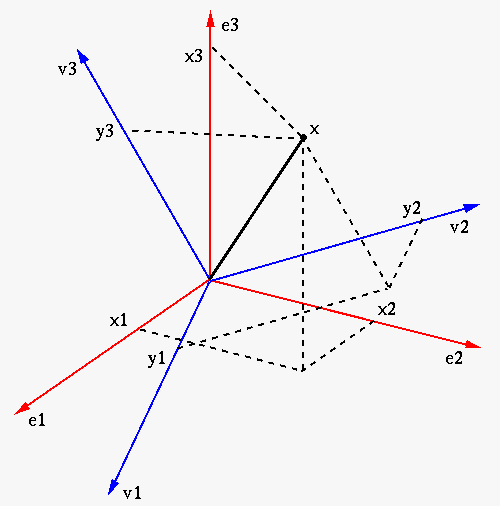
The space can also be spanned by any other orthonormal basis
 satisfying
satisfying
 |
(45) |
 can also be represented as a weighted
vector sum of these basis vectors:
can also be represented as a weighted
vector sum of these basis vectors:
![$\displaystyle {\bf x}=\sum_{i=1}^d y_i {\bf a}_i
=\left[\begin{array}{ccc}&&\\ ...
...ight]
\left[ \begin{array}{c} y_1\\ \vdots \\ y_d \end{array} \right]
={\bf Ay}$](img190.svg) |
(46) |
![${\bf A}=[{\bf a}_1,\cdots,{\bf a}_d]$](img191.svg) composed of
orthonormal column vectors is an orthogonal matrix satisfying
composed of
orthonormal column vectors is an orthogonal matrix satisfying
 , and
, and
![${\bf y}=[y_1,\cdots,y_d]^T$](img193.svg) is a vector containing all coordinates in the directions of
the basis vector
is a vector containing all coordinates in the directions of
the basis vector
 , which can be
found by premultiplying
, which can be
found by premultiplying
 on both sides of
the equation above
on both sides of
the equation above
 :
:
![$\displaystyle {\bf A}^T{\bf Ay}={\bf y}
=\left[ \begin{array}{c} y_1\\ \vdots \...
...in{array}{c}{\bf a}_1^T{\bf x}\\ \vdots\\ {\bf a}_d^T{\bf x}
\end{array}\right]$](img197.svg) |
(47) |
 is the
projection of onto the ith basis vector
is the
projection of onto the ith basis vector  .
.
The basis vectors in
can
be considered as a rotated version of the standard basis in
, and the norm or length
of before and and  after the transform remain
the same:
after the transform remain
the same:
 |
(48) |
Summarizing the above, we can define an orthogonal transform based on
any orthogonal matrix  :
:
 |
(49) |
under the implicit standard basis,
the column vectors of
, is
transformed into
 under the explicit
basis, the column vectors of
.
under the explicit
basis, the column vectors of
.
Any orthogonal transform
is actually a
rotation of the standard basis
into
another orthonormal basis
spanning
the same space, while and are just the coordinates
or coefficients of the same vector under these two different coordinate
systems.
If is treated as a random vector, then the linear
transform
, is also a random vector,
and its mean vector and covariance can be found as:
 |
|
![$\displaystyle E[ {\bf y} ]=E[ {\bf A}^T{\bf x} ]
={\bf A}^T E[ {\bf x} ]={\bf A}^T{\bf m}_x$](img203.svg) |
|
 |
|
![$\displaystyle E[ {\bf yy}^T ]-{\bf m}_y{\bf m}_y^T
=E[ {\bf A}^T{\bf x}{\bf x}^T{\bf A} ]
-{\bf A}^T{\bf m}_x{\bf m}_x^T{\bf A}$](img205.svg) |
|
|
![$\displaystyle {\bf A}^T[ E[ {\bf x}{\bf x}^T ]-{\bf m}_x{\bf m}^T]{\bf A}
={\bf A}^T{\bf\Sigma}_x{\bf A}$](img206.svg) |
(50) |
In particular, the Karhunen-Loeve Transform (KLT) is just
one of such orthogonal transforms in the form of
 , where the orthogonal transform matrix
, where the orthogonal transform matrix
![${\bf V}=[{\bf v}_1,\cdots,{\bf v}_d]$](img208.svg) is the eigenvector matrix
of the covariance matrix
is the eigenvector matrix
of the covariance matrix
 of , composed of
the normalized eigenvectors of
. As in general
the covariance matrix
is symmetric and positive
definite, its eigenvalues
of , composed of
the normalized eigenvectors of
. As in general
the covariance matrix
is symmetric and positive
definite, its eigenvalues
 are real
and positive, and its eigenvectors are orthogonal, i.e., its
eigenvector matrix
are real
and positive, and its eigenvectors are orthogonal, i.e., its
eigenvector matrix  is indeed an orthogonal matrix
satisfying
is indeed an orthogonal matrix
satisfying
 or
or
 .
.
The eigenvalues
and the
corresponding eigenvectors
 can
then be found by solving the eigenequations:
can
then be found by solving the eigenequations:
 |
(51) |
![$\displaystyle {\bf\Sigma}_x{\bf V}={\bf\Sigma}_x[{\bf v}_1,\cdots,{\bf v}_d]
=[...
...dots&\ddots&\vdots\\ 0&\cdots&\lambda_d
\end{array}\right]
={\bf V}{\bf\Lambda}$](img215.svg) |
(52) |
 is a diagonal
matrix. Premultiplying
on both sides, we get
is a diagonal
matrix. Premultiplying
on both sides, we get
 |
(53) |
 |
(54) |
and its inverse
 are diagonalized by the orthogonal
eigenvector matrix to become
are diagonalized by the orthogonal
eigenvector matrix to become
 and
and
 respectively.
respectively.
Based on the orthogonal eigenvector matrix , the
KLT is defined as:
 is the projection
of onto the ith eigenvector
is the projection
of onto the ith eigenvector  . Premultiplying
. Premultiplying
 on both sides of the forward transform
, we get the inverse KLT transform, by
which vector is represented as a linear combination of the
eigenvectors
as the basis vectors:
on both sides of the forward transform
, we get the inverse KLT transform, by
which vector is represented as a linear combination of the
eigenvectors
as the basis vectors:
![$\displaystyle {\bf x}={\bf V} {\bf y}=\left[\begin{array}{cccc}&&\\
{\bf v}_1&...
...n{array}{c} y_1\\ \vdots \\ y_d \end{array} \right]
=\sum_{i=1}^d y_i {\bf v}_i$](img225.svg) |
(56) |
Example:
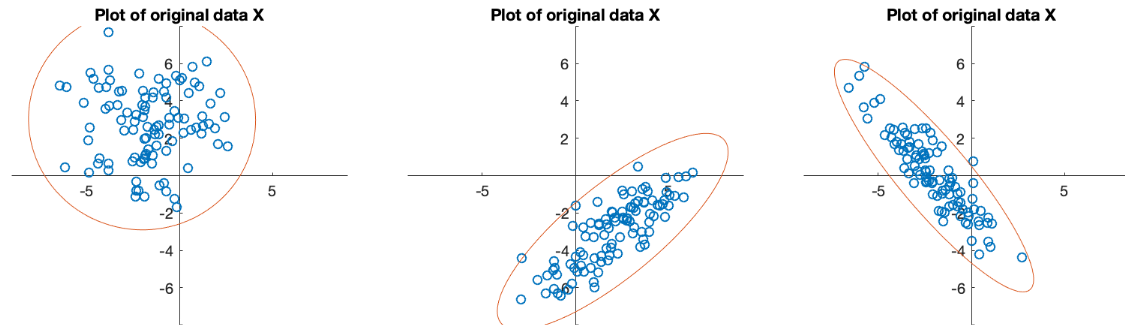
![$\displaystyle {\bf\Sigma}_1=\left[\begin{array}{rr}2.964 & 0.544\\ 0.544 & 4.68...
...gma}_3=\left[\begin{array}{rr}3.043 & -3.076\\ -3.076 & 3.930\end{array}\right]$](img226.svg) |
(57) |
 |
(58) |
 |
(59) |
![$\displaystyle {\bf y}=\left[ \begin{array}{c} y_1\\ \vdots \\ y_d
\end{array} \...
...n{array}{c}
{\bf v}_1^T{\bf x}\\ \vdots\\ {\bf v}_d^T{\bf x}
\end{array}\right]$](img221.svg)