The optimization problems subject to equality constraints can be
generally formulated as:
 |
(173) |
where
 is the objective function and
is the objective function and
 is the ith constraint. Here
is the ith constraint. Here  , as in general there does not
exist a solution that satisfies more than
, as in general there does not
exist a solution that satisfies more than  equations in the N-D
space.
equations in the N-D
space.
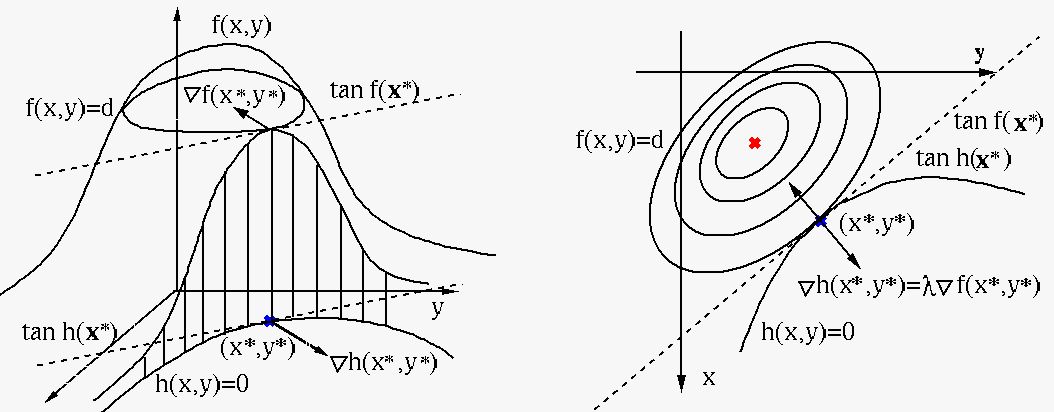
This problem can be visualized in the special case with  and
and
 , where both
and
, where both
and
 are surfaces defined
over the 2-D space spanned by
are surfaces defined
over the 2-D space spanned by  and
and  , and
, and
 is the intersection line of
and the 2-D plane. The
solution
is the intersection line of
and the 2-D plane. The
solution  must satisfy the following two conditions:
must satisfy the following two conditions:
- is on the intersection line, i.e.,
 ;
;
- is on the contour line
 (for some
(for some
 as shown in the figure), so that
as shown in the figure), so that
 neither
increase nor decrease (no point is higher or lower) in the
neighborhood of along the contour line.
neither
increase nor decrease (no point is higher or lower) in the
neighborhood of along the contour line.
For both conditions to be satisfied, the two contours
and
must coincide at , i.e., they must
have the same tangents and therefore parallel gradients (perpendicular
to the tangents):
 |
(174) |
where
![$\bigtriangledown_{\bf x}f({\bf x})=[\partial f/\partial x_1,
\cdots,\partial f/\partial x_N ]^T$](img653.svg) is the gradient of
,
and
is the gradient of
,
and  is a constant scaling factor which can be either
positive if the two gradients are in the same direction or negative
if they are in opposite directions. As here we are only interested
in whether the two curves coincide or not, the sign of
is a constant scaling factor which can be either
positive if the two gradients are in the same direction or negative
if they are in opposite directions. As here we are only interested
in whether the two curves coincide or not, the sign of  can be either positive or negative.
can be either positive or negative.
To find such a point , we first construct a new
objective function, called the Lagrange function (or simply
Lagrangian):
 |
(175) |
where is the Lagrange multiplier, which can be
either positive or negative (i.e., the sign in front of
can be either plus or minus), and then set the gradient of this
objective function with respect to as well as  to zero:
to zero:
![$\displaystyle \bigtriangledown_{{\bf x},\lambda} L({\bf x},\lambda)
=\bigtriangledown_{{\bf x},\lambda} [ f({\bf x})-\lambda\, h({\bf x}) ]
={\bf0}$](img657.svg) |
(176) |
This equation contains two parts:
 |
(177) |
This is an equation system containing  equations for
the same number of unknowns
equations for
the same number of unknowns
 :
:
 |
(178) |
The solution
![${\bf x}^*=[x_1^*,\,x_2^*]^T$](img662.svg) and of this
equation system happens to satisfy the two desired relationships:
(a)
and of this
equation system happens to satisfy the two desired relationships:
(a)
 ,
and (b)
.
,
and (b)
.
Specially, consider the following two possible cases:
- If
 , then
, then
 ,
indicating
is an extremum independent of the constraint,
i.e., the constraint
is inactive, and the
optimization is unconstrained.
,
indicating
is an extremum independent of the constraint,
i.e., the constraint
is inactive, and the
optimization is unconstrained.
- If
 , then
, then
 (as in general
(as in general
 ),
indicating
is not an extremum without the constraint,
i.e., the constraint is active, and the optimization is indeed
constrained.
),
indicating
is not an extremum without the constraint,
i.e., the constraint is active, and the optimization is indeed
constrained.
The discussion above can be generalized from 2-D to an  dimensional
space, in which the optimal solution is to be found to
extremize the objective
subject to
dimensional
space, in which the optimal solution is to be found to
extremize the objective
subject to  equality
constraints
equality
constraints
 , each representing a
contour surface in the N-D space. The solution must
satisfy the following two conditions:
, each representing a
contour surface in the N-D space. The solution must
satisfy the following two conditions:
- is on all contour surfaces so that
 , i.e., it is on the
intersection of these surfaces, a curve in the space (e.g.,
the intersection of two surfaces in 3-D space is a curve);
, i.e., it is on the
intersection of these surfaces, a curve in the space (e.g.,
the intersection of two surfaces in 3-D space is a curve);
- is on a contour surface
 (for some value ) so that
is an extremum,
i.e., it does not increase or degrease in the neighborhood of
along the curve.
(for some value ) so that
is an extremum,
i.e., it does not increase or degrease in the neighborhood of
along the curve.
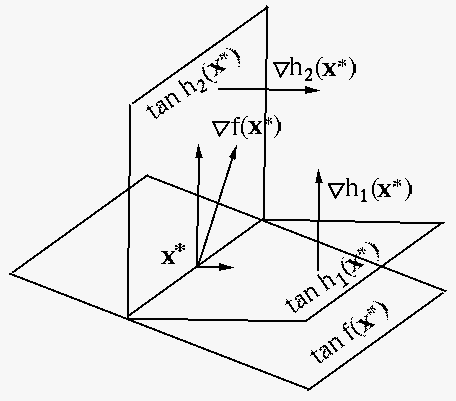
Combining these conditions, we see that the intersection (a
curve or a surface) of the surfaces
must
coincide with the contour surface
at ,
i.e., the intersection of the tangent surfaces of
through must coincide with the tangent surface of
at , therefore the gradient
 must be a linear combination
of the gradients
must be a linear combination
of the gradients
 :
:
 |
(179) |
To find such a solution of the optimization problem,
we first construct the Lagrange function:
 |
(180) |
where
![${\bf\lambda}=[\lambda_1,\cdots,\lambda_m]^T$](img677.svg) is a vector
for Lagrange multipliers, and then set its gradient to
zero:
is a vector
for Lagrange multipliers, and then set its gradient to
zero:
![$\displaystyle \bigtriangledown_{{\bf x},{\bf\lambda}} L({\bf x},{\bf\lambda})
=...
...\lambda}}
\left[ f({\bf x})-\sum_{i=1}^m \lambda_i h_i({\bf x}) \right]
={\bf0}$](img678.svg) |
(181) |
to get the following two equation systems of and equations
repectively:
 i.e. i.e. |
(182) |
and
 |
(183) |
The first set of equations indicates that the gradient
 at is a
linear combination of the gradients
at is a
linear combination of the gradients
 , while the second
set of equations guarantees that also satisfy
the equality constraints. Solving these equations we get
the desired soluton together with the Lagrange
multipliers
, while the second
set of equations guarantees that also satisfy
the equality constraints. Solving these equations we get
the desired soluton together with the Lagrange
multipliers
 . This is the
Lagrange multiplier method.
. This is the
Lagrange multiplier method.
Specially, if
 , then the ith constraint is not active.
More specially if
for all
, then the ith constraint is not active.
More specially if
for all
 , then
, then
 |
(184) |
indicating
is an extremum independent of any of
the constraints, i.e., is an unconstrained solution,
and the optimization problem is unconstrained.