Next: Markov Decision Process Up: Introduction to Reinforcement Learning Previous: Introduction to Reinforcement Learning
Reinforcement learning (RL) can be considered as one of the three basic machine learning paradigms, alongside supervised learning (e.g., regression and classification) and unsupervised learning (e.g., clustering) discussed previously. The goal of RL is for the algorithm, a software agent, to learn to make a sequence of decisions, called policy, for a specific task in a given environment, for the purpose of receiving the maximum rewards from the environment.
Different from supervised learning for either regression or
classification based on a given training dataset composed of
a set of i.i.d. sample points  labeled by
labeled by
 , RL is a learning method without any examples
of optimal behaviors. Instead, RL learns on its own without
relying on any labeled training dataset explicitely informing
the agent what the correct responses are while interacting
with the environment. On the other hand, different from the
unsupervised methods that learns passively from the given
dataset, RL is a trial-and-error learning method, in which
the agent actively interacts with and learns from the given
environment.
, RL is a learning method without any examples
of optimal behaviors. Instead, RL learns on its own without
relying on any labeled training dataset explicitely informing
the agent what the correct responses are while interacting
with the environment. On the other hand, different from the
unsupervised methods that learns passively from the given
dataset, RL is a trial-and-error learning method, in which
the agent actively interacts with and learns from the given
environment.
Specifically, RL as a sequential method depends on the dynamics of the environment which is modeled by a Markov decision process (MDP), a stochatic system of multiple states with probabilistic state transitions and rewards. If the MDP model of the environment in terms of its the state transition and reward probabilities is known, the agaent only needs to find the optimal policy in terms of what action to take at each state of the MDP to achieve maximum accumulated rewards as the consequence of its actions. The task in this model-based case is called planning. On the other hand, if MDP of the environment is unknown, the agent needs to learn the environment by repeatedly running the dynamic process of the MDP based on some initial policy and gradually evaluate the received rewards and improve the policy to eventually reach optimality. The task in this model-free case is called control.
Depending on the action taken by the agent in the current
state  , the system transits to the next state
, the system transits to the next state  following certain transition probability distribution. The
RL is to choose the optial action in the current state, to
maximize the long-term expected reward, as the feedback of
the environment. This is typically carried out by
dynamic programming (DP), a class of algorithms
seeking to simplify a complex problem by breaking it up
into a set of sub-problems which can be solved recursively.
following certain transition probability distribution. The
RL is to choose the optial action in the current state, to
maximize the long-term expected reward, as the feedback of
the environment. This is typically carried out by
dynamic programming (DP), a class of algorithms
seeking to simplify a complex problem by breaking it up
into a set of sub-problems which can be solved recursively.
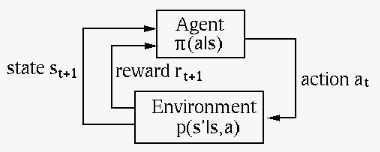
The figure below illustrates the basic concepts of RL,
where the agent makes a decision in terms of the action
 to take in the current state
to take in the current state  by following some
policy
by following some
policy  , while the environment makes a transition
from the current state to the next state
, while the environment makes a transition
from the current state to the next state  by following the transition probability, a conditional
probability
by following the transition probability, a conditional
probability
 for the next state
for the next state
 given the curent state
given the curent state  and the action taken
by the agent, and provides a reward
and the action taken
by the agent, and provides a reward  .
.