Two possible difficulties may occur in the above Hough transform method:
(a) the shape has to be described by an equation, and (b) the number of
parameters ![]() (dimensions of the parameter space) may be high. Given the
two equations:
(dimensions of the parameter space) may be high. Given the
two equations:


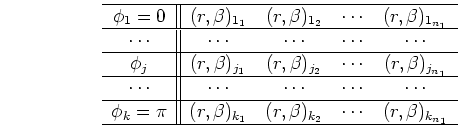
For each image point ![]() with
with ![]() , find the table entry with its
corresponding angle
, find the table entry with its
corresponding angle ![]() closest to
closest to ![]() . Then for each of the
. Then for each of the
![]() pairs
pairs ![]() (
(
![]() ) in this table entry, find
) in this table entry, find

All elements in the H table satisfying
![]() represent the
locations of the shape in the image.
represent the
locations of the shape in the image.
It is desirable to detect a certain 2D shape independent of its orientation and
scale, as well as its location. To do so, two additional parameters, a scaling factor
![]() and a rotational angle
and a rotational angle ![]() , are needed to describe the shape. Now the Hough
space becomes 4-dimensional
, are needed to describe the shape. Now the Hough
space becomes 4-dimensional
![]() . The detection algorithm becomes
the following:
. The detection algorithm becomes
the following:
For each image point ![]() with
with ![]() , find the proper table entry with
, find the proper table entry with
![]() . Then for each of the
. Then for each of the ![]() pairs
pairs ![]() (
(
![]() ) in this table entry, do the following for all
) in this table entry, do the following for all ![]() and
and ![]() :
find
:
find

All elements in the H table satisfying
![]() represent the
scaling factor
represent the
scaling factor ![]() , rotation angle
, rotation angle ![]() of the shape, as well as its reference
point location
of the shape, as well as its reference
point location ![]() in the image.
in the image.