The Jacobi method solves the eigenvalue problem of a real symmetric
matrice
 , of which all eigenvalues are real and
all eigenvectors are orthogonal to each other (as shown
here). This algorithm
produces the eigenvalue matrix
, of which all eigenvalues are real and
all eigenvectors are orthogonal to each other (as shown
here). This algorithm
produces the eigenvalue matrix
 and eigenvector matrix
and eigenvector matrix
 satisfying
satisfying
 .
.
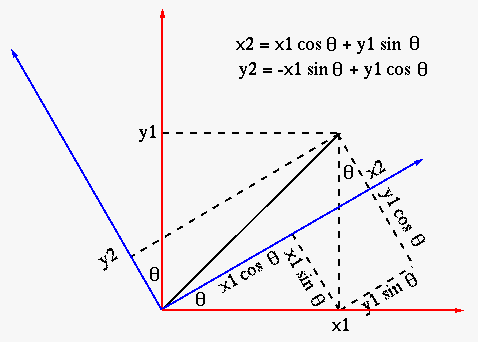
We first review the rotation of a vector in both 2 and 3-D space by
an orthogonal rotation matrix. In a 2-D space, the rotation matrix
is
![$\displaystyle {\bf R}(\theta)
=\left[\begin{array}{rr}\cos\theta&-\sin\theta\\ ...
...eta
\end{array}\right] =\left[\begin{array}{rr}c & -s\\ s & c\end{array}\right]$](img52.svg) |
(15) |
where  is the rotation angle,
is the rotation angle,
 and
and
 .
This rotation matrix is orthogonal satisfying
.
This rotation matrix is orthogonal satisfying
 .
Pre-multiplying
.
Pre-multiplying  to a column vector
to a column vector
![${\bf v}_1=[x_1, y_1]^T$](img58.svg) we
get a rotated version of the vector:
we
get a rotated version of the vector:
![$\displaystyle {\bf v}_2=\left[\begin{array}{c}x_2\\ y_2\end{array}\right]
={\bf...
...nd{array}\right]
=\left[\begin{array}{r}cx_1-sy_1\\ sx_1+cy_1\end{array}\right]$](img59.svg) |
(16) |
Taking transpose of the equatioin, we get the rotation of the row
vector
![${\bf v}_1^T=[x_1,\;y_1]$](img60.svg) by post-multiplying
by post-multiplying  :
:
![$\displaystyle {\bf v}^T_2=[x_2,\,y_2]=({\bf Rv}_1^T={\bf v}^T_1{\bf R}^T
=[x_1\...
...\;\left[\begin{array}{rr}c&s\\ -s&c\end{array}\right]
=[cx_1-sy_1\;\;sx_1+cy_1]$](img62.svg) |
(17) |
As is an orthogonal matrix, the norms of the column or row
vector is preserved, i..e.,
 .
The rotation can be either clockwise if
.
The rotation can be either clockwise if  or counter clockwise
if
or counter clockwise
if  .
.
In a 3-D space, a rotation by an angle around each of the
three principal axes can be carried out by each of the following
three rotation matrices:
![$\displaystyle {\bf R}_x(\theta)
=\left[\begin{array}{rrr}1&0&0\\ 0&c&-s\\ 0&s&c...
... R}_z(\theta)
=\left[\begin{array}{rrr}c&-s&0\\ s&c&0\\ 0&0&1\end{array}\right]$](img66.svg) |
(18) |
In general, in an N-D space, the rotation around the direction
of the cross-product of the ith column and the jth column
 (the normal direction of the plane spanned
by
(the normal direction of the plane spanned
by  and
and  ), referred to as Givens rotation,
can be carried out by the following matrix:
), referred to as Givens rotation,
can be carried out by the following matrix:
This is an identical matrix with four of its elements modified,
 and
and
 . As all rows and columns are
orthonormal, is orthogonal.
. As all rows and columns are
orthonormal, is orthogonal.
The Jacobi method finds the eigenvalues of a symmetric matrix  by
iteratively rotating its rows and columns in such a way that all of the
off-diagonal elements are eliminated one at a time, so that eventually the
resulting matrix becomes the diagonal eigenvalue matrix
,
and the product of all rotation matrices used in the process becomes the
orthogonal eigenvector matrix . Specifically, in each iteration,
we pre and post multiply
by
iteratively rotating its rows and columns in such a way that all of the
off-diagonal elements are eliminated one at a time, so that eventually the
resulting matrix becomes the diagonal eigenvalue matrix
,
and the product of all rotation matrices used in the process becomes the
orthogonal eigenvector matrix . Specifically, in each iteration,
we pre and post multiply
 to , so that
its ith and jth columns and rows are modified, while all other elements
remain the same:
to , so that
its ith and jth columns and rows are modified, while all other elements
remain the same:
![$\displaystyle {\bf A}'={\bf R}{\bf A}{\bf R}^T
=\left[\begin{array}{ccccccc}
&\...
...ots&&\vdots&&\vdots\\
&\cdots&a'_{ni}&\cdots&a'_{nj}&\cdots&\end{array}\right]$](img77.svg) |
(20) |
As
is symmetric, the resulting matrix is also
symmetric:
 |
(21) |
For example, the 2nd and 4th columns and rows of a  matrix are modified by
matrix are modified by
 :
:
We can verify that as
 is symmetric, i.e.,
is symmetric, i.e.,
 , the resulting
, the resulting  is also symmetric. In
general, the ith and jth rows and columns are updated as shown
below:
is also symmetric. In
general, the ith and jth rows and columns are updated as shown
below:
As is an orthogonal matrix that preserves the norms
of the row and column vectors of , i.e.,
 , when an off-diagonal
element
, when an off-diagonal
element 
 is eliminated to zero, the values of the
diagonal elements
is eliminated to zero, the values of the
diagonal elements  and
and  will be increased. We desire
to find the rotation angle so that after the rotation the
off-diagonal element becomes zero:
will be increased. We desire
to find the rotation angle so that after the rotation the
off-diagonal element becomes zero:
 |
(24) |
This equation can be written as
 i.e., i.e., |
(25) |
where we have defined
 |
(26) |
Solving the equation above for  , we get
, we get
 |
(27) |
We will always choose the root with the smaller absolute value
for better precision:
 |
(28) |
Having found , we can further find  and
and  in the rotation
matrix
:
in the rotation
matrix
:
 |
(29) |
by which
will be eliminated. This process is repeated
to eliminate the off-diagonal component with the maximum absolute
value, the pivot, until eventually the matrix becomes diagonal,
containing all eigenvalues.
Note that in each iteration only the ith and jth rows and columns
of the matrix are affected, we can therefore update these rows and
columns alone based on the equations given above, without actually
carry out the matrix multiplication to reduce computational cost.
Moreover, to minimize the roundoff error, we prefer to update the elements
of the rows and columns in an iterative fashion by adding a term to its old
value. To do so, we first solve the equation above
 for
for  and
and  to get
to get
Substituting these into the expressions for and respectively,
we get the following iterations:
 |
(30) |
and
 |
(31) |
We then rewrite the update equations for  and
and  as:
as:
where
 |
(32) |
If we set an off-diagonal element to zero  by
,
with
and
defined above, then the values
of the diagonal elements and of the resulting matrix
by
,
with
and
defined above, then the values
of the diagonal elements and of the resulting matrix
 will be increased. If we iteratively
carry out such rotations to set the off-diagonal elements to zero one at
a time
will be increased. If we iteratively
carry out such rotations to set the off-diagonal elements to zero one at
a time
until eventually the resulting matrix
 becomes diagonal
containing the eigenvalues of , and
becomes diagonal
containing the eigenvalues of , and
 contains the corresponding eigenvectors.
contains the corresponding eigenvectors.
In summary, here are the steps in each iteration of the Jacobi algorithm:
- Find the off-diagonal element (
 ) of the greatest absolute
value, the pivot, and find
) of the greatest absolute
value, the pivot, and find
 .
.
- Solve the quadratic equation
 for
for
 .
.
- Obtain
 and
and
 .
.
- Update all elements in the ith and jth rows and columns.
The iteration terminates when all off-diagonal elements are close enough to zero,
and we get a diagonal matrix as the eigenvalue matrix:
 |
(34) |
where
 is the eigenvector matrix.
is the eigenvector matrix.
Example: Find the eigenvalue matrix and eigenvector matrix of the
following matrix:
- Find
 :
:
 |
(35) |
- Find
. As
 , we have
, we have
 |
(36) |
The rotation angle is
 .
.
- Find and
 |
(37) |
- Find
 and
and 
 |
(38) |
- Find the eigenvector and eigenvalue matrices:


![$\displaystyle \left[\begin{array}{rrrrrrr}
1&\cdots&0&\cdots&0&\cdots&0\\
\vdo...
...\cdots&0&\cdots&1\end{array}\right]\begin{array}{c}\\ i\\ \\ j\\ \\ \end{array}$](img72.svg)

![$\displaystyle {\bf A}'={\bf R}{\bf A}{\bf R}^T=\left[\begin{array}{ccccc}
1 & 0...
...\\ 0 & 0 & 1 & 0 & 0\\ 0 &-s & 0 & c & 0\\ 0 & 0 & 0 & 0 & 1
\end{array}\right]$](img81.svg)
![$\displaystyle \left[\begin{array}{ccccc}
a_{11} & a_{12} & a_{13} & a_{14} & a_...
...\\ 0 & 0 & 1 & 0 & 0\\ 0 &-s & 0 & c & 0\\ 0 & 0 & 0 & 0 & 1
\end{array}\right]$](img82.svg)
![$\displaystyle \left[\begin{array}{ccccc}1 & 0 & 0 & 0 & 0\\ 0 & c & 0 & -s& 0
\...
...51} & ca_{52}-sa_{54} & a_{53} & sa_{52}+ca_{54} & a_{55}\\
\end{array}\right]$](img83.svg)
![$\displaystyle \left[\begin{array}{ccccc}
a_{11} & ca_{12}-sa_{14} & a_{13} & sa...
...51} & ca_{52}-sa_{54} & a_{53} & sa_{52}+ca_{54} & a_{55}\\
\end{array}\right]$](img84.svg)

















![$\displaystyle {\bf A}=\left[\begin{array}{cc}3&2\\ 2&1\end{array}\right]
$](img138.svg)
![$\displaystyle {\bf V}=\left[\begin{array}{rr}c&s\\ -s&c\end{array}\right]
=\le...
...array}\right]
=\left[\begin{array}{cc}4.2361&0\\ 0&-0.2361\end{array}\right]
$](img148.svg)